

Nonsingular fixed time adaptive attitude control method of rigid aircraft
A technology of attitude control and fixed time, which is applied in the direction of attitude control, non-electric variable control, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The present invention will be further described below in conjunction with the drawings.
[0071] Refer to Figure 1- Image 6 , A non-singular fixed-time adaptive attitude control method of a rigid aircraft, the control method includes the following steps:
[0072] Step 1. Establish the kinematics and dynamics model of the aircraft, initialize the system state and control parameters, the process is as follows:
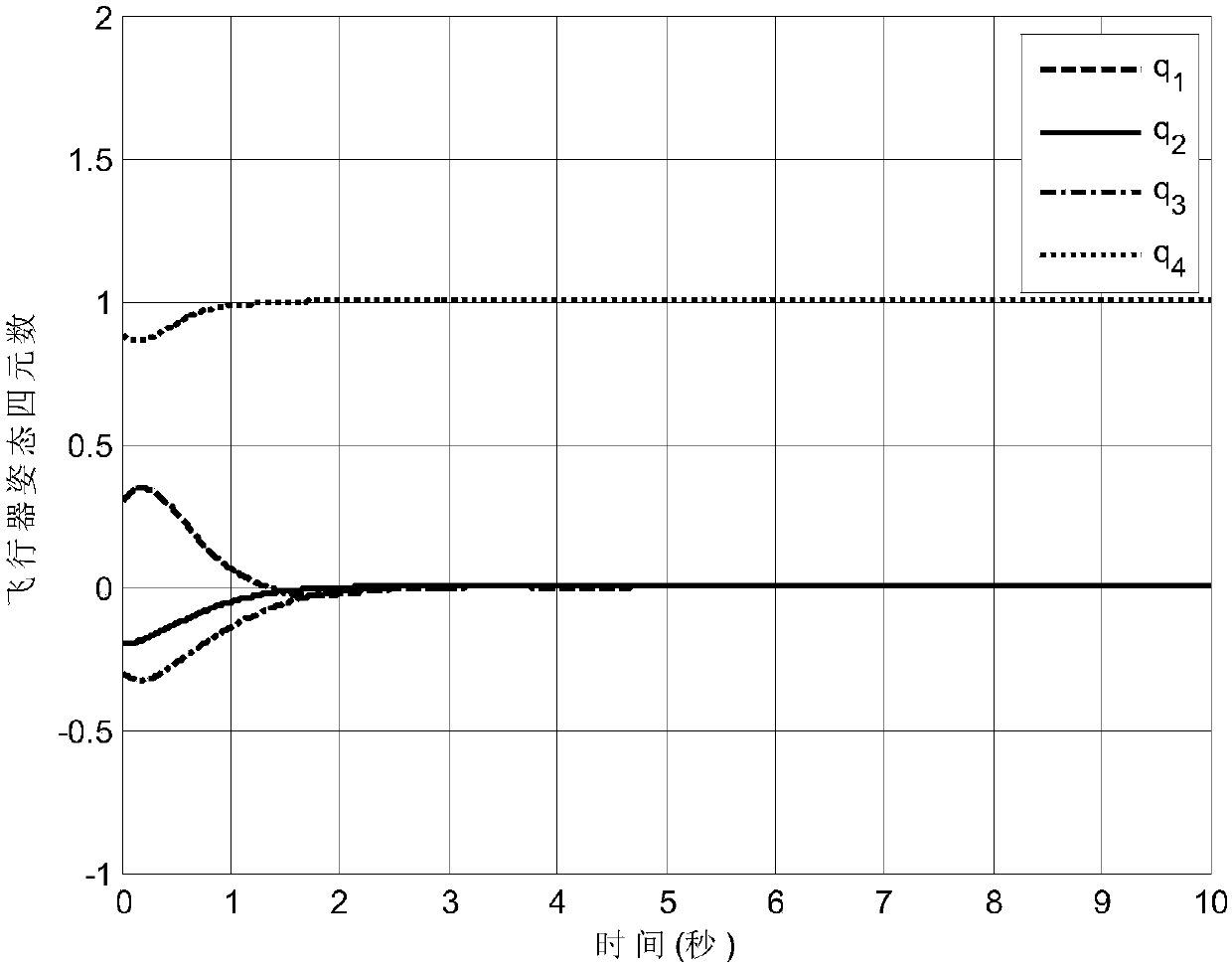
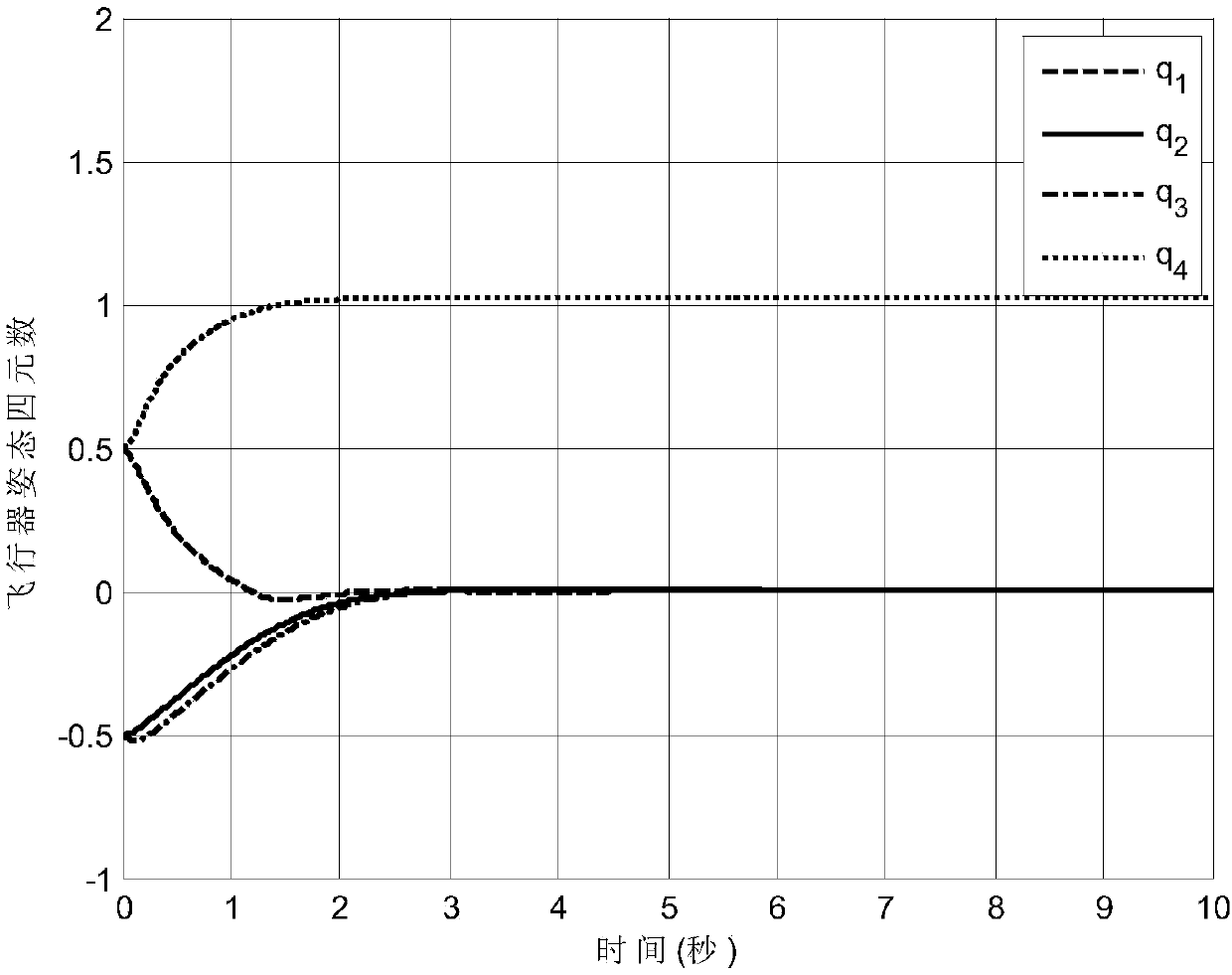
[0073] 1.1 The expression form of the kinematics model of the aircraft attitude system is:
[0074]
[0075]
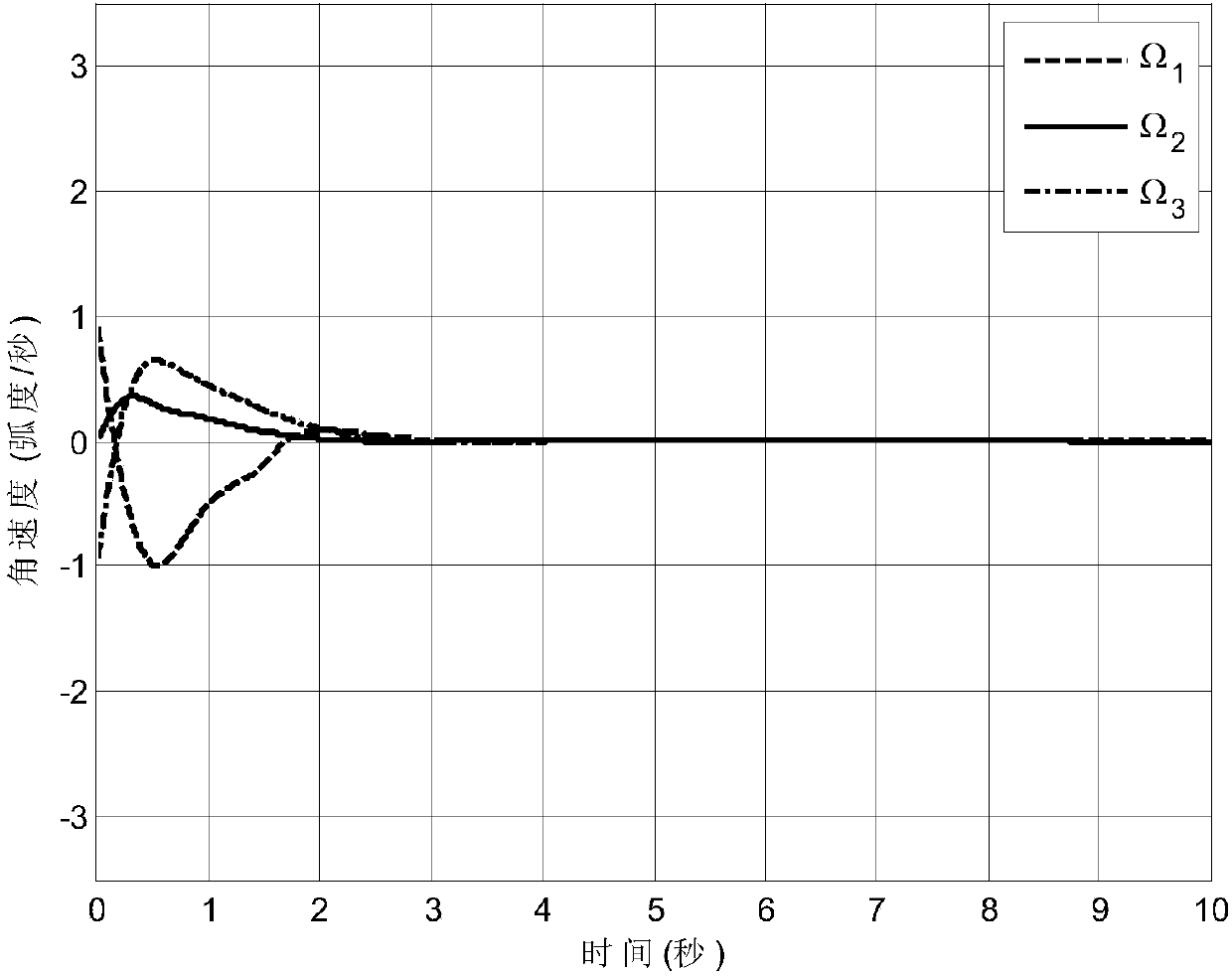
[0076] Where q v =[q 1 ,q 2 ,q 3 ] T And q 4 The vector part and the scalar part of the unit quaternion respectively satisfy Respectively q v And q 4 Derivative of; Ω∈R 3 Is the angular velocity of the aircraft; I 3 Is R 3×3 Identity matrix; × is the operation symbol, apply the operation symbol × to a=[a 1 ,a 2 ,a 3 ] T , Get:
[0077]
[0078] 1.2 The expression form of the dynamic model of the aircraft attitude system is:
[0079]
[0080] Where J ∈ R 3×3 Is t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More