

A Disturbance Observation Compensation Control Method for Fast Mirror Based on Single Accelerometer
An accelerometer, compensation control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of high price and power consumption, large volume and mass of fiber optic gyroscope, achieve light weight and improve disturbance suppression Ability, small size effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The specific implementation manners of the present invention will be described in detail below in conjunction with the accompanying drawings.
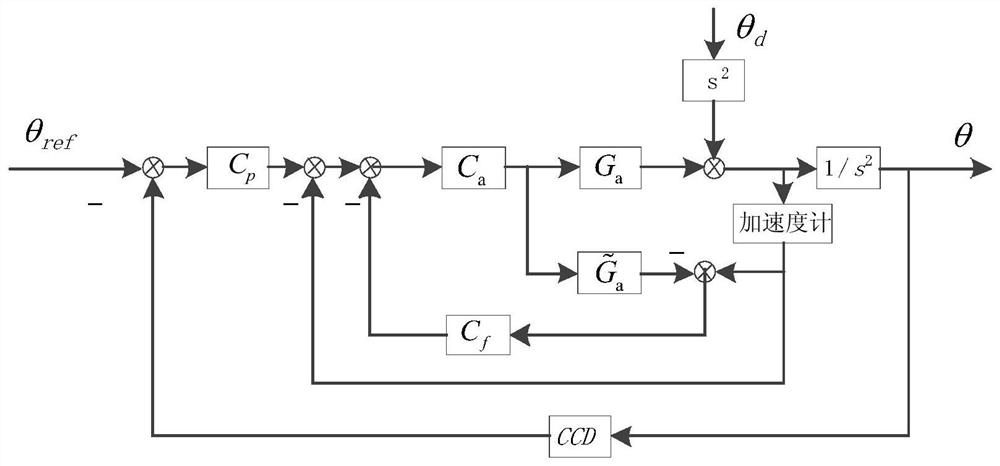
[0027] as attached figure 1 Shown is a control block diagram of a single accelerometer-based disturbance observation compensation control method for a fast mirror, which includes a disturbance observer compensator loop, an acceleration loop, and a CCD position loop; the feedforward control of the disturbance observation compensator and the acceleration The combination of position feedback control can give full play to the performance of the accelerometer and further improve the disturbance suppression ability of the system. The concrete implementation steps of adopting described device to realize feed-forward control method are as follows:
[0028] Step (1): Accelerometers are respectively installed on the two deflection axes of the fast mirror stabilized platform to sense the angular acceleration of the two axes of the platfor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More