

Collaborative synchronous positioning and map building method and system and interactive system
A technology for synchronous positioning and map construction, which is applied in transmission systems, 3D modeling, surveying and navigation, etc., and can solve problems that are only reflected in map construction, no SLAM information is stored, and data frame synchronization is difficult to achieve.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0093] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
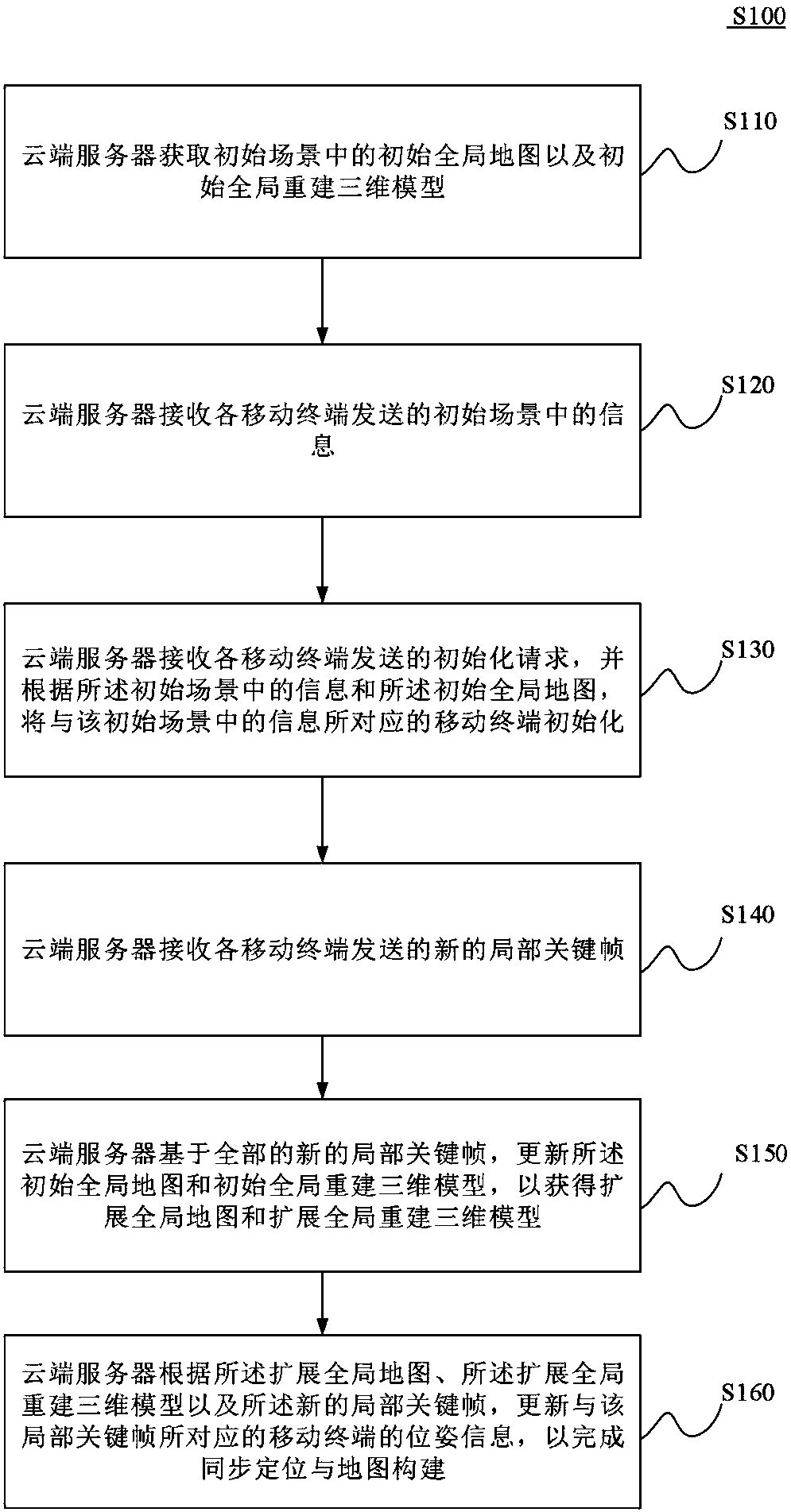
[0094] Such as figure 1 As shown, it is a flowchart of a collaborative synchronous positioning and map construction method S100 in the first embodiment of the present invention, and the method S100 includes:
[0095] S110. The cloud server acquires an initial global map and an initial global reconstructed 3D model in the initial scene.
[0096] Specifically, in this step, the initial scene may be the target scene or a part of the target scene of the following collaborative synchronous positioning and map construction system, but the initial scene itself is not too limited, and may be a part of the indoor area or a A room, or something larger than a room, such ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More