

Guide wire intervention device for minimally invasive intervention surgical robot
A technology for surgical robot and guide wire intervention, which is applied in the fields of surgical robot, surgery, medical science, etc. It can solve the problems of unreliable guide wire intervention, unsynchronized guide wire delivery and rotation, etc., and achieves simple structure, reliable clamping, and reduced vibration effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
[0039] It should be declared that: in the description of the embodiment of the present invention, it is stipulated that the direction in which the guide wire intervenes into the blood vessel is "front".
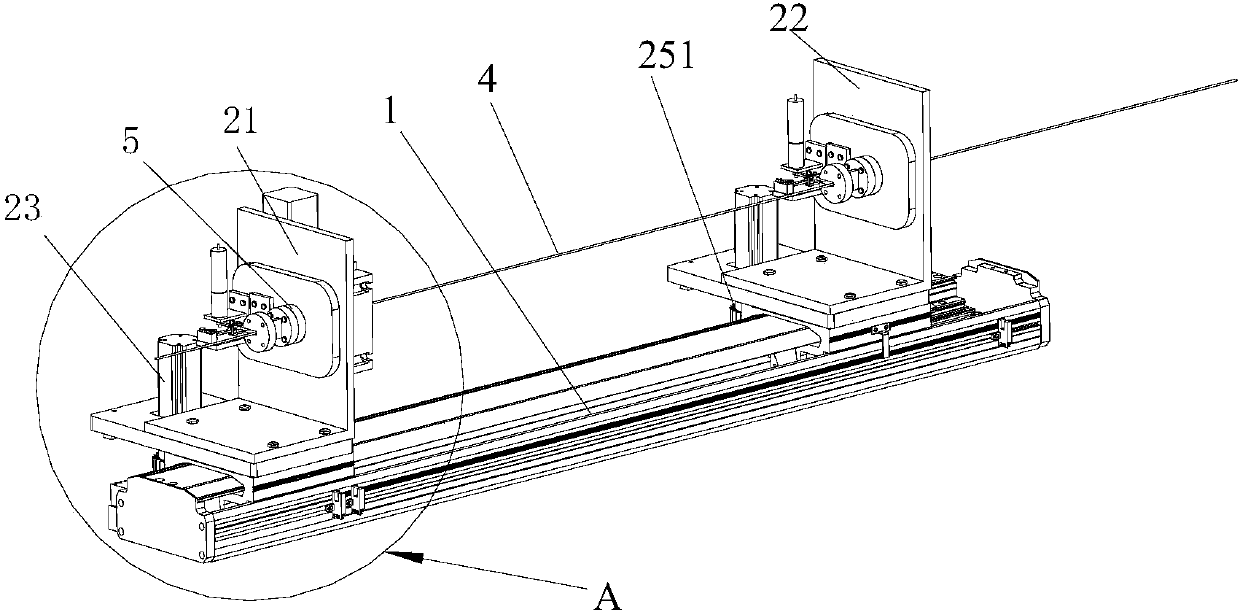
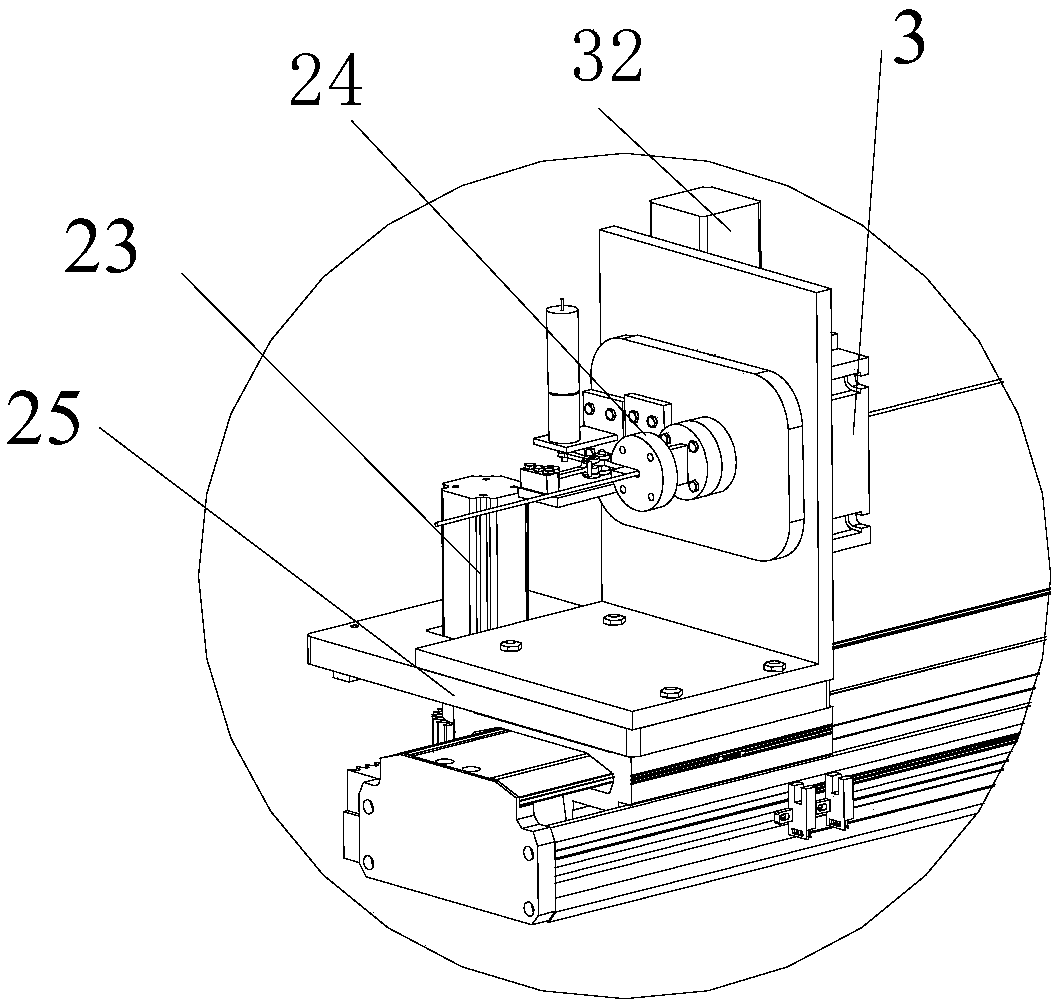
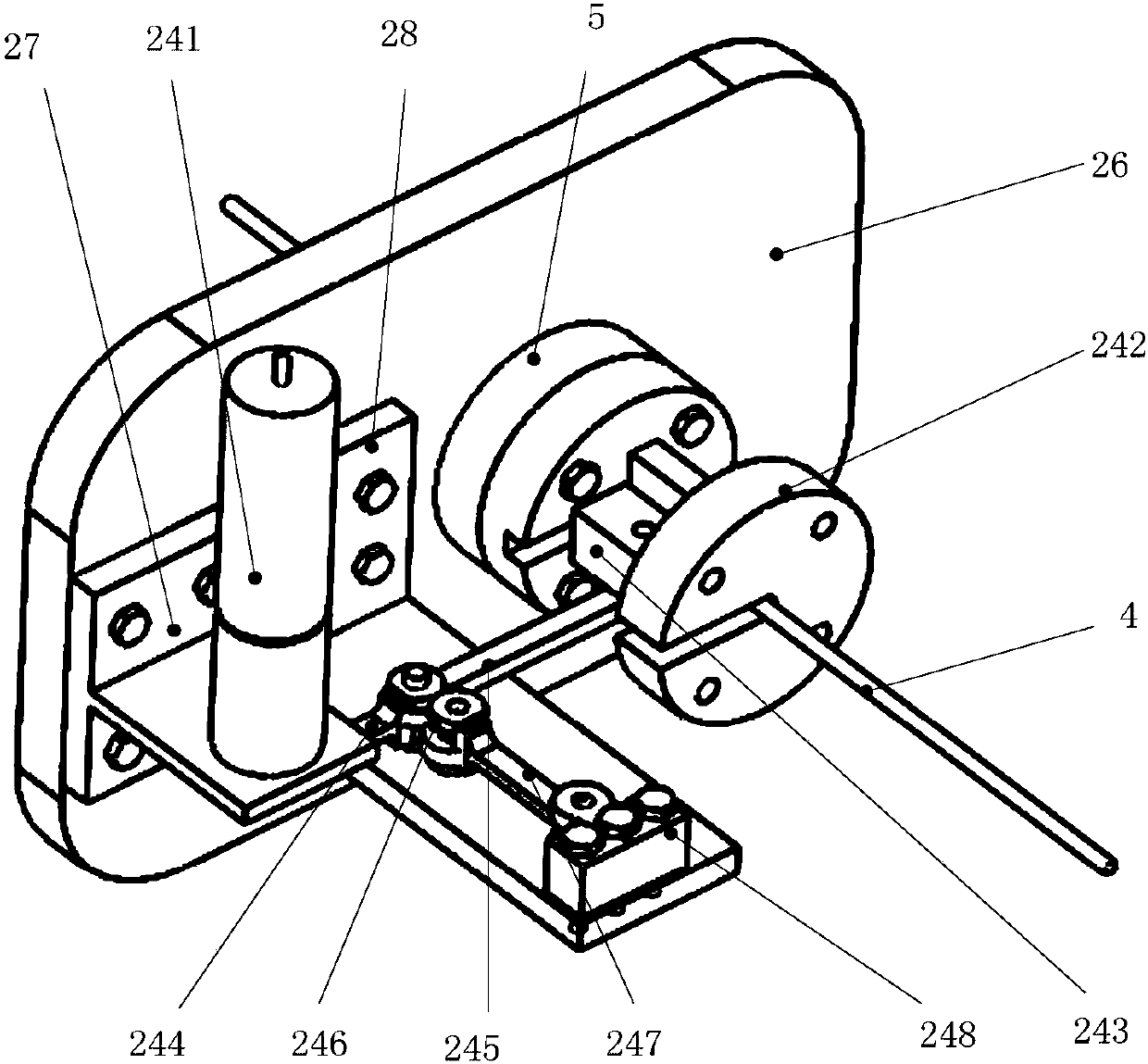
[0040] Such as Figure 1-Figure 8 The shown specific embodiment of the guide wire intervention device of the minimally invasive interventional surgery robot of the present invention includes: a slide rail 1, at least two moving finger assemblies and a rotating assembly 3 that move along the slide rail 1; the moving finger assembly includes: The moving finger drive motor 23 to drive the moving finger assembly to move along the slide rail 1, the clamping mecha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More