

A vehicle emergency collision avoidance control method considering moving obstacles
A control method and technology for obstacles, applied in the directions of control devices, vehicle components, transportation and packaging, etc., can solve the problems of unconsidered, unsafe and reliable collision avoidance process, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
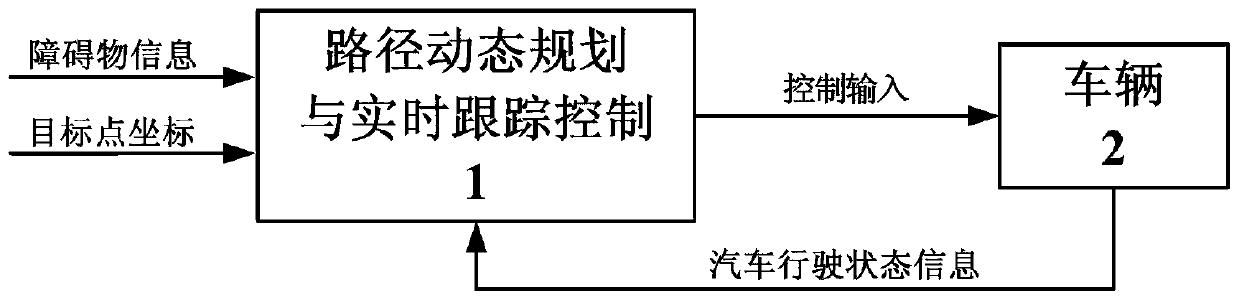
[0076] Such as figure 1 As shown, the vehicle emergency collision avoidance control method considering moving obstacles in the present invention is: path dynamic planning and real-time tracking control module 1, according to the obstacle information collected in real time, target point coordinates, vehicle driving state information, real-time optimization to obtain the vehicle 2 The steering angle of the front wheels and the slip ratio of the four wheels are used to control the vehicle 2 to avoid collisions; the obstacle information includes the discrete point coordinates of the obstacle outline, which are obtained from the measurement of the radar sensor; the driving state information of the vehicle includes the vehicle longitudinal speed, side The longitudinal speed and lateral speed of the car are measured by the vehicle speed sensor, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More