

Calibration device and method of multi-line laser radar
A calibration device and multi-line laser technology, applied in the field of intelligent vehicle environmental perception, can solve the problems of cumbersome calibration process, difficulty in determining the actual position coordinates of laser scanning points, and complex discrete and complex scanning trajectory shapes, and achieve the effect of improving accuracy and efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
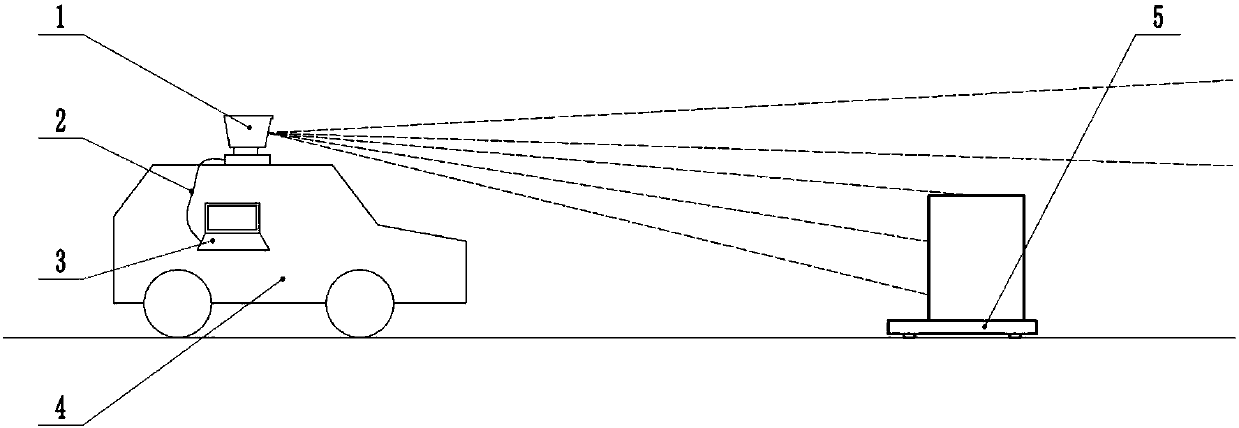
[0043] LiDAR calibration principle:
[0044] Because the laser radar 1 and the vehicle 4 are fixedly connected together, the radar coordinate system and the vehicle coordinate system respectively fixed on the two have a definite relative positional relationship. The calibration process is to find a suitable coordinate transformation matrix T, so that the three-dimensional coordinates of the object output by the lidar in the radar coordinate system can be converted into three-dimensional coordinates in the vehicle coordinate system, which can be called by the upper module of the smart car. The calibration process is divided into three steps: obtaining the radar coordinate system data output by the radar, obtaining the actual position data of the calibration point, and solving the calibration matrix.
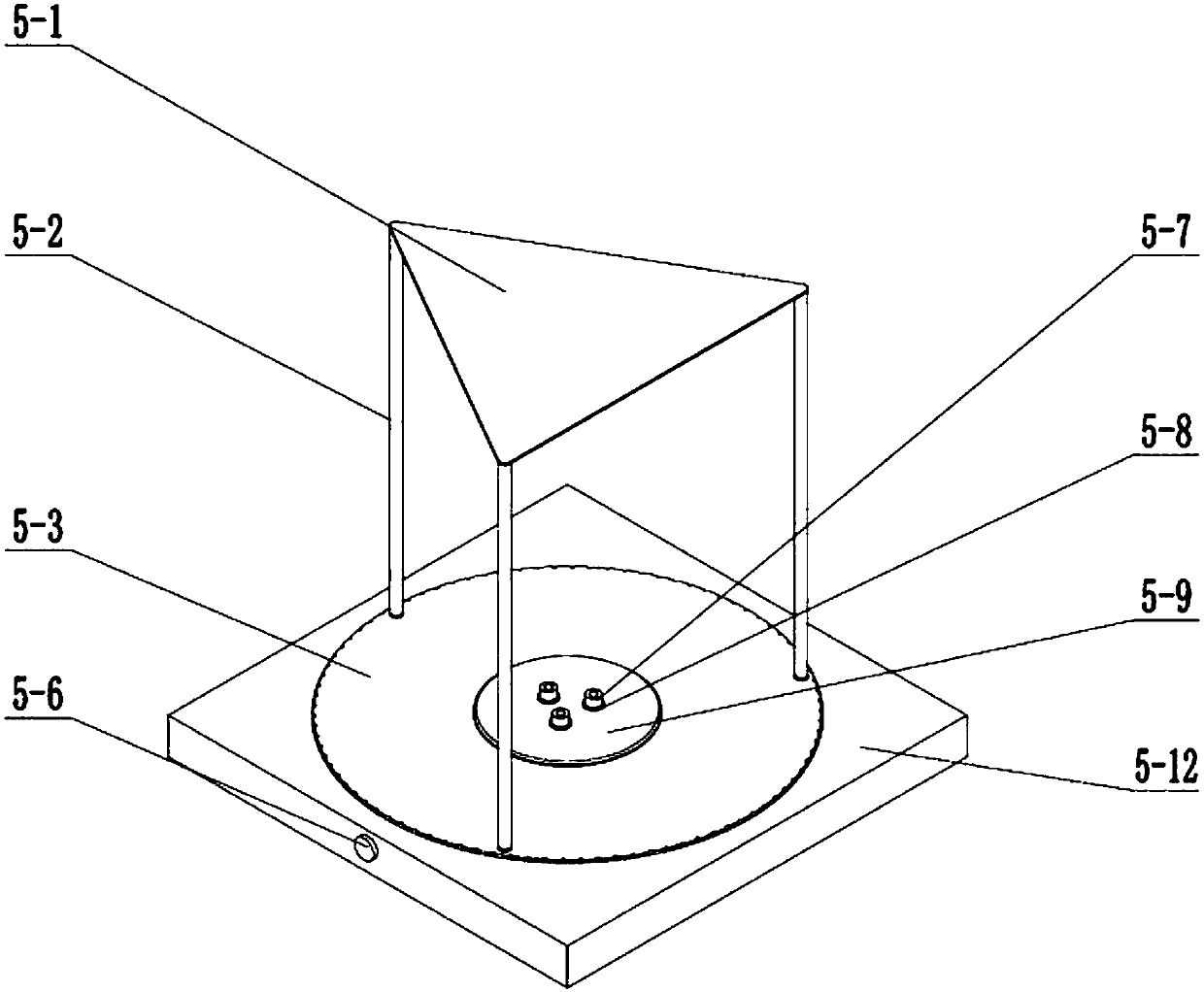
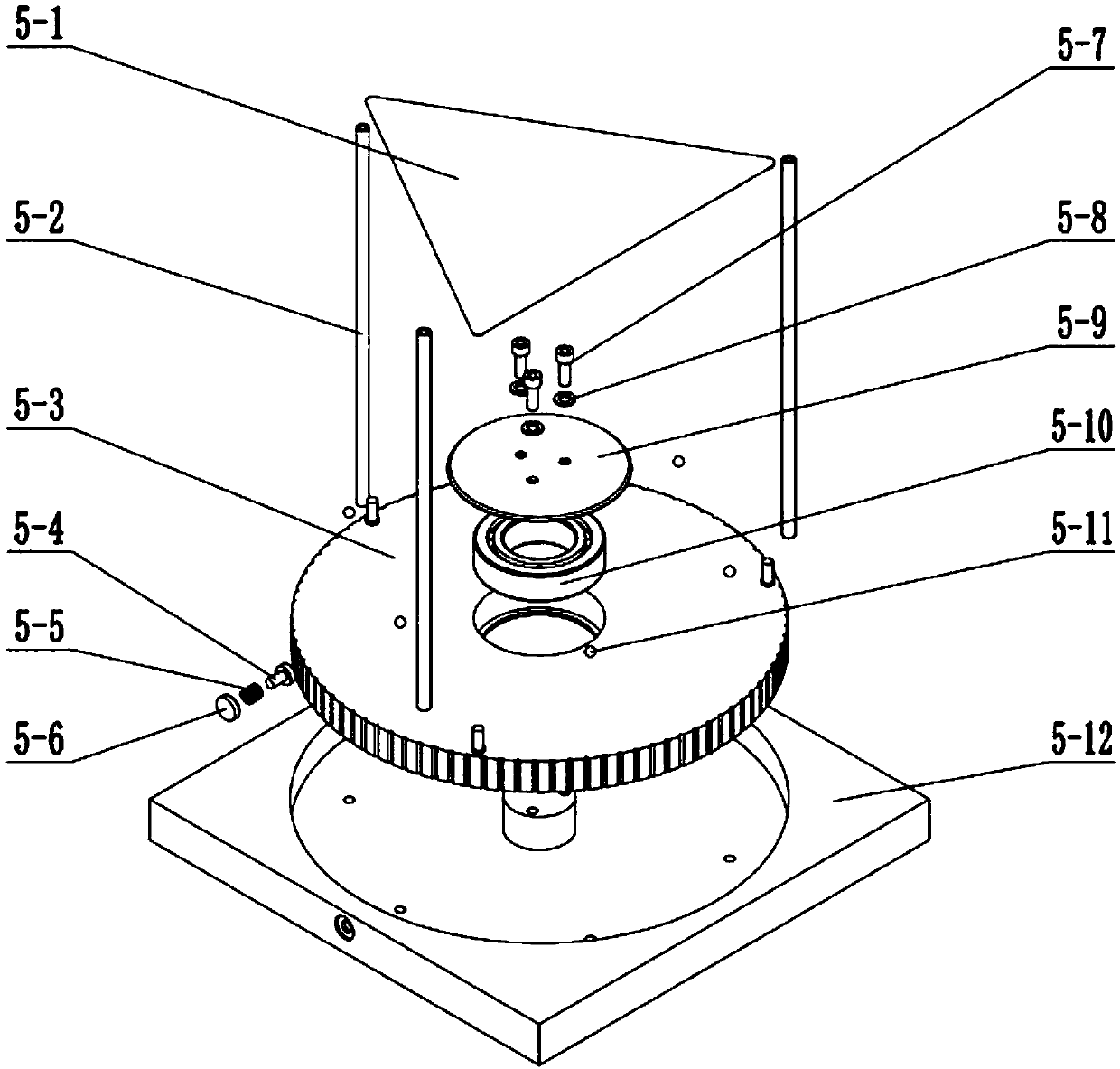
[0045] The working principle of the calibration device to obtain calibration point data:
[0046] In the past, when using a vertical thin rod perpendicular to the horizontal grou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More