

All-terrain part conveying robot
A handling robot and all-terrain technology, which is applied in the direction of manipulators, manufacturing tools, etc., to achieve the effect of realizing automatic handling and reducing the occupied space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
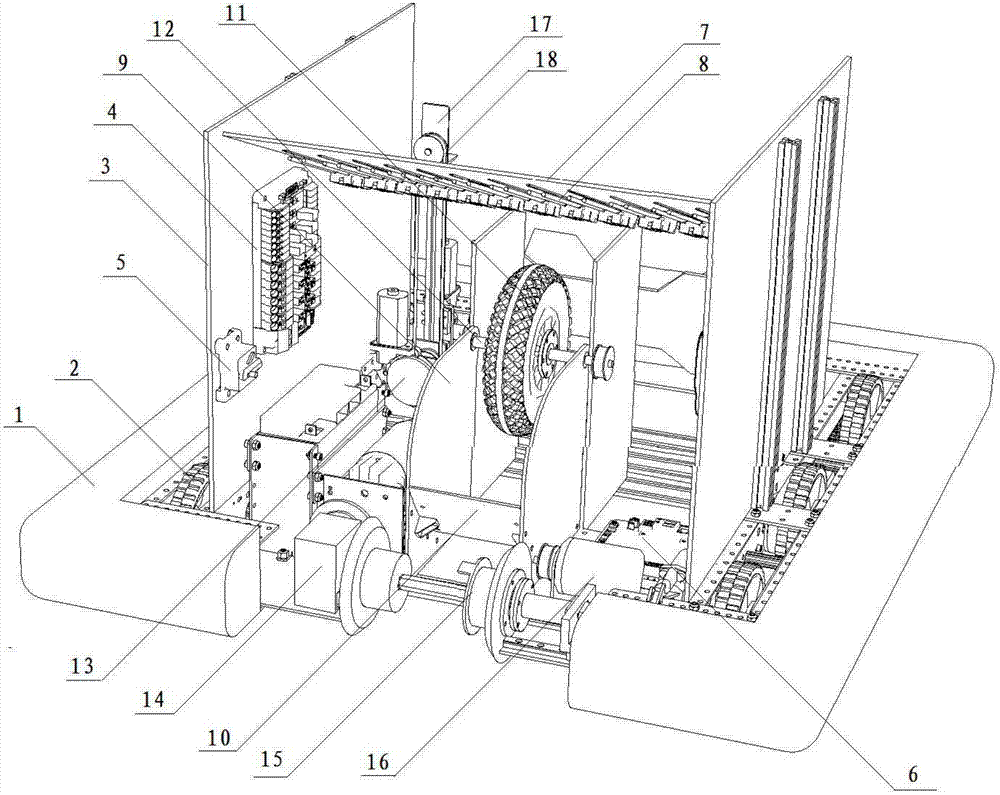
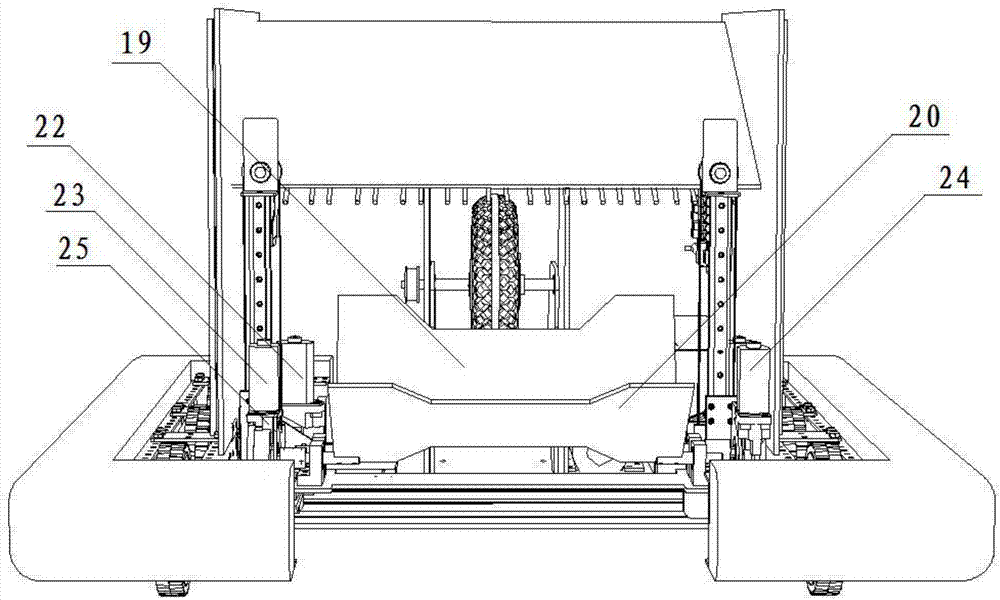
[0034] Embodiment 1, the present invention is used to carry ball parts, such as fuel balls, plastic balls, etc., the main controller 6 controls the roller drive motor 16 to drive the rollers 2 to move, through the rear baffle 19 on the pick-up mechanism and the front baffle 20 The relative rotation adjusts the size of the charging trough formed with the carrier plate 21, and then the tailgate rotating motor 22 guides the ball parts into the arc track plate 10 of the launch mechanism by adjusting the rotation of the tailgate 19, and the main controller 6 The rotating speed of driving the ball parts is obtained by controlling the flywheel drive motor 13 to drive the flywheel 11 to rotate in advance, so as to launch the ball parts along the arc track plate 10 into a predetermined collection device.
Embodiment 2
[0035] Embodiment 2, the present invention is used for handling gear parts, main controller 6 controls the first lifting motor 23 and the second lifting motor 24 to drive the synchronous belt 18 to lift along the guide rail, and realize the bearing plate 21 and the rear baffle 19, the front baffle The lifting of the charging trough formed by 20 hangs the gear parts in the collection device, and the roller drive motor 16 pre-drives the roller 2 to move and cooperate with the rotation of the front fender 20 and the rear fender 19 to realize picking up the gear parts.
Embodiment 3
[0036]Embodiment 3, the present invention hinges the rope to be climbed through the helical mechanism 15 on the rope climbing mechanism, and drives the helical mechanism 15 to rotate and wrap the rope through the helical drive motor 14 to drive the whole robot to climb along the rope.
[0037] The present invention can communicate with the router 5 through a wireless network or a cable to communicate with the router 5 through an external control computer. The instrument sensor and the ultrasonic sensor are respectively used to correct the movement angle of the robot and to precisely control the distance between the robot and the target.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More