

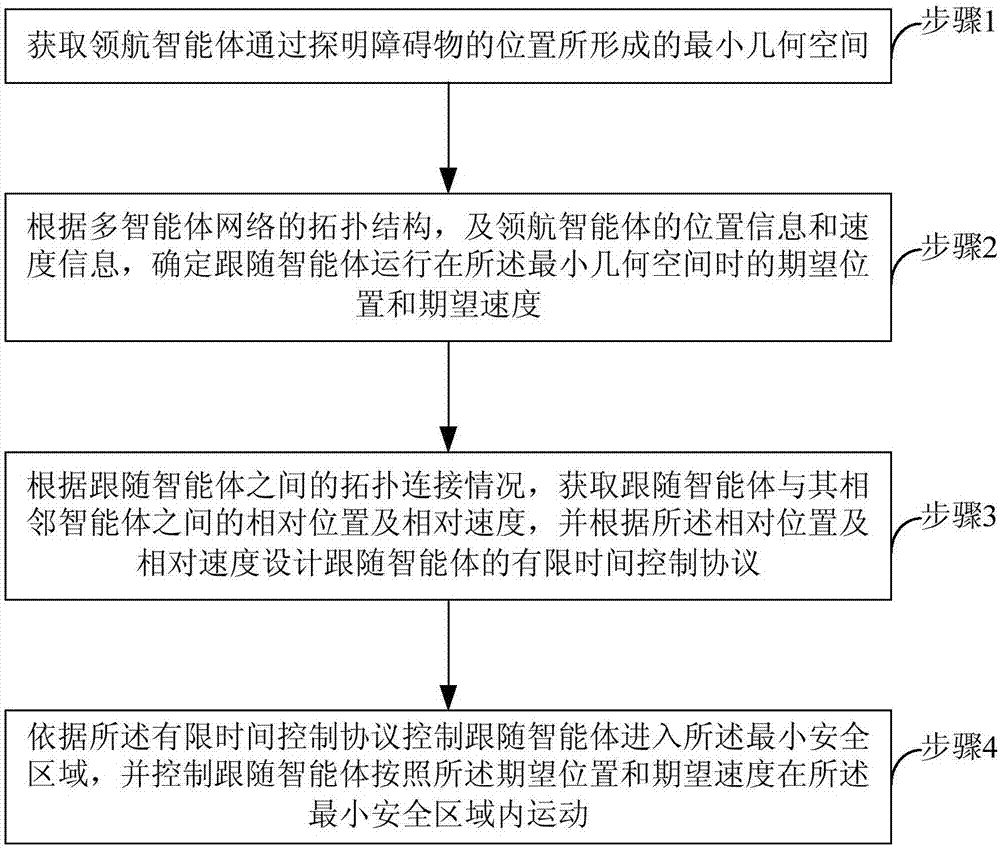
Multiagent network finite time containment control method and apparatus
A multi-agent, limited-time technology, which is applied in data exchange network, service based on location information, digital transmission system, etc., can solve the problems of inability to realize rapid and limited-time inclusive control of intelligent agents, and achieve high speed and stability , good robustness, and ensure the effect of coordinated safety control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
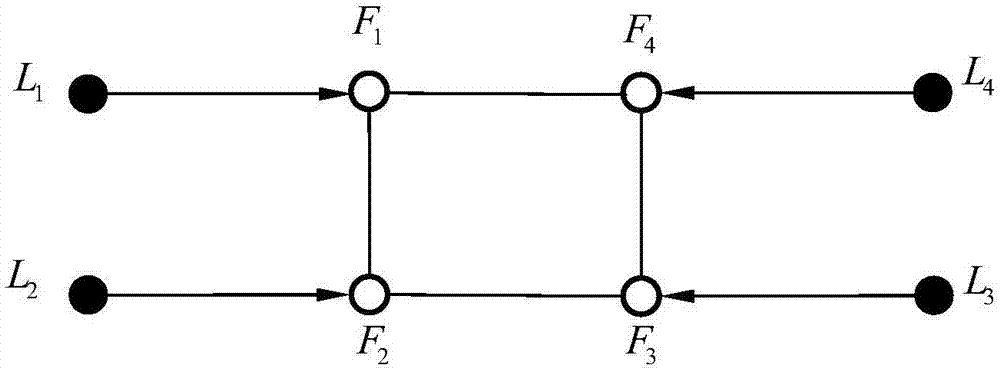
[0098] In this embodiment, consider a network composed of 8 agents, including 4 pilot agents and 4 follower agents. The network topology is as follows: image 3 Shown, L 1 ~L 4 Represents 4 pilot agents, F 1 ~F 4 Represents 4 following agents. by image 3 It can be seen that there is no direct connection between the following agents. For each following agent, there is at least one pilot agent communicating with it. Let nonlinear dynamics and nonlinear disturbances be:
[0099]
[0100] g(x i ,v i )=(0,-0.158sin(0.1256t)) T ,i∈L
[0101] ρ i =[0.5sin(x i1 )+0.5sin(v i1 ),0.5cos(x i2 )+0.5cos(v i2 )] T ,i∈F
[0102] Using the variable structure control idea, based on the relative position and relative speed information between the agents, two control schemes are designed, as shown in the control protocol (4) and control protocol (5) respectively.
[0103] When the control protocol (4) is adopted, in this embodiment, in order to enable the nonlinear network to achieve finite time inclus...
Embodiment 2
[0106] In order to relax the restriction on the network topology, in this embodiment, the situation of strong direct connection between follower agents is studied.
[0107] Consider a directed network topology composed of 10 agents, including 4 pilot agents L 1 ~L 4 And 6 following agents F 1 ~F 6 , Its network topology such as Image 6 As shown, there is a strong connection between the following agents. For each following agent, there is at least one pilot agent communicating with it. In the second embodiment, the same essential nonlinear dynamics and nonlinear disturbances as in the first embodiment are adopted, and the Laplacian matrix Γ corresponding to the network topology connection between the following agents is used. 1 It is a non-singular matrix but non-symmetric positive definite.
[0108] A non-smooth discontinuous control control protocol is designed to realize the finite time containment control of the nonlinear network, and the sliding mode error vector is defined as:...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More