

Automatic-disturbance-rejection flight speed and attitude control method of unmanned helicopter
A technology of unmanned helicopter and active disturbance rejection control, which is applied in attitude control, vehicle position/route/height control, non-electric variable control, etc. It can solve the problem of unsatisfactory control effect without good algorithm, linear combination and not necessarily combination method And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0062] Such as figure 1 As shown, an unmanned helicopter self-disturbance rejection flight speed and attitude control method, including
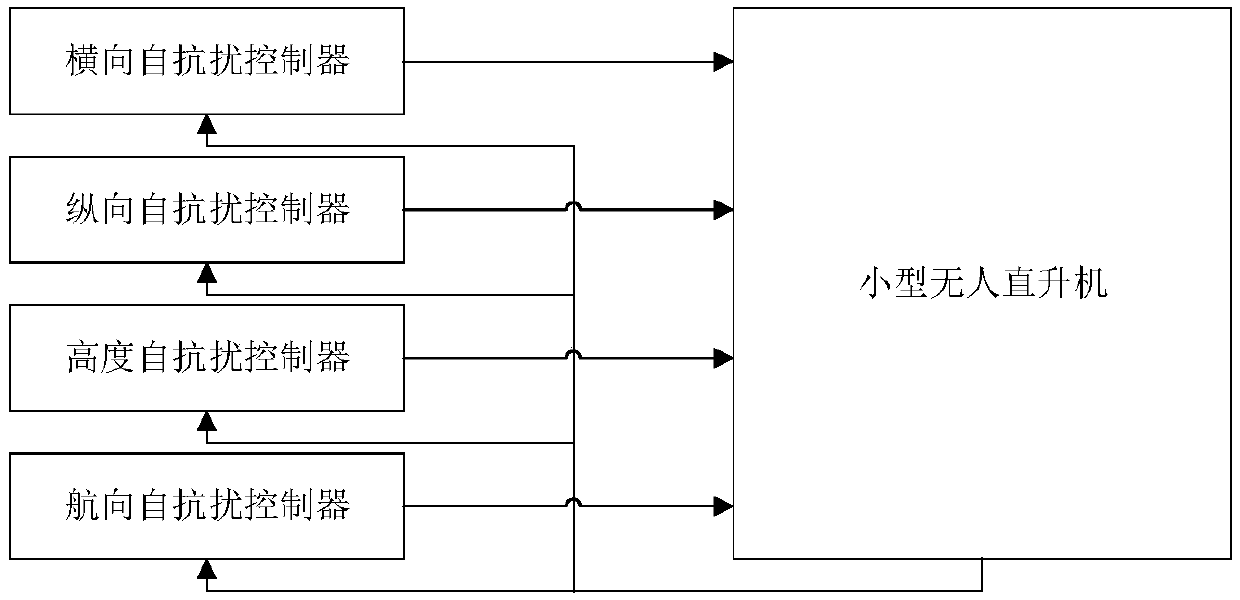
[0063] The coupling between channels is regarded as a disturbance, and the ADRC controller can cancel the coupling through the disturbance estimation and disturbance compensation of the extended state observer. From the perspective of parallel connection, the schematic block diagram of the control system channel of the small unmanned helicopter is as follows: figure 2 shown.
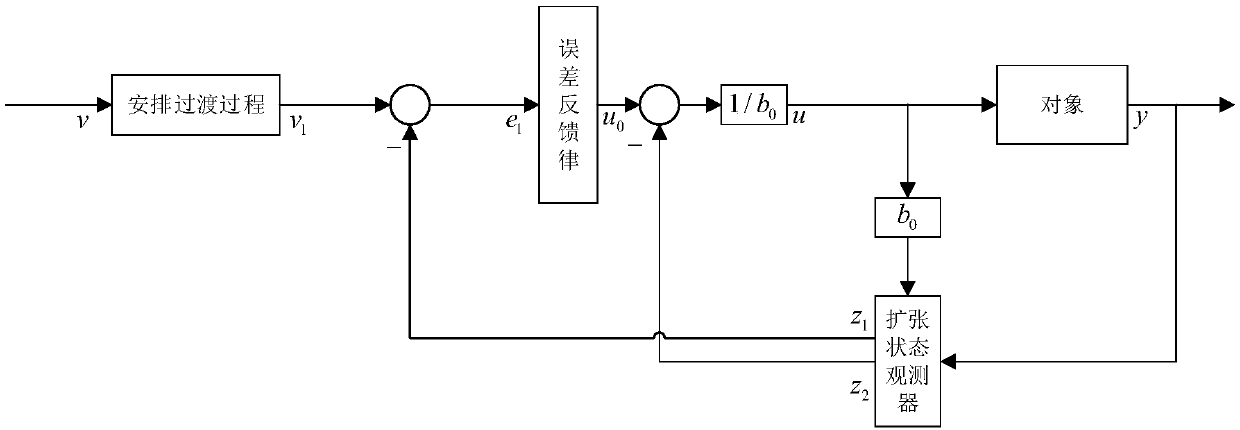
[0064] The anti-disturbance controller needs to use the fal function many times. The definition of the fal function is as follows:
[0065]
[0066] The extended state observer is the most important part of the ADRR algorithm. It regards the difference between the actual system and the established model as a disturbance. It real...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More