

Artificial lower limb system based on pneumatic muscle
A pneumatic muscle and muscle technology, applied in the field of bionic robots, to achieve the effect of compact structure, high power/mass ratio, and good flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
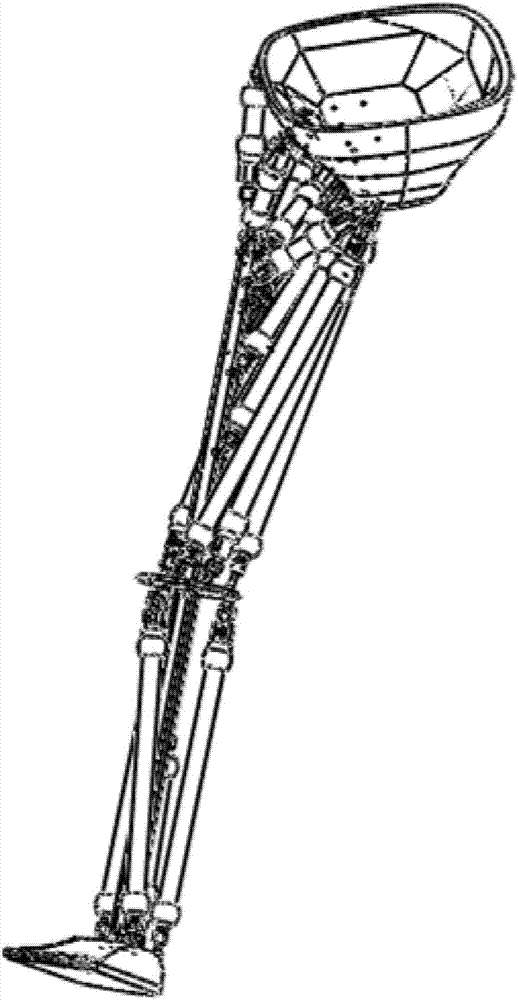
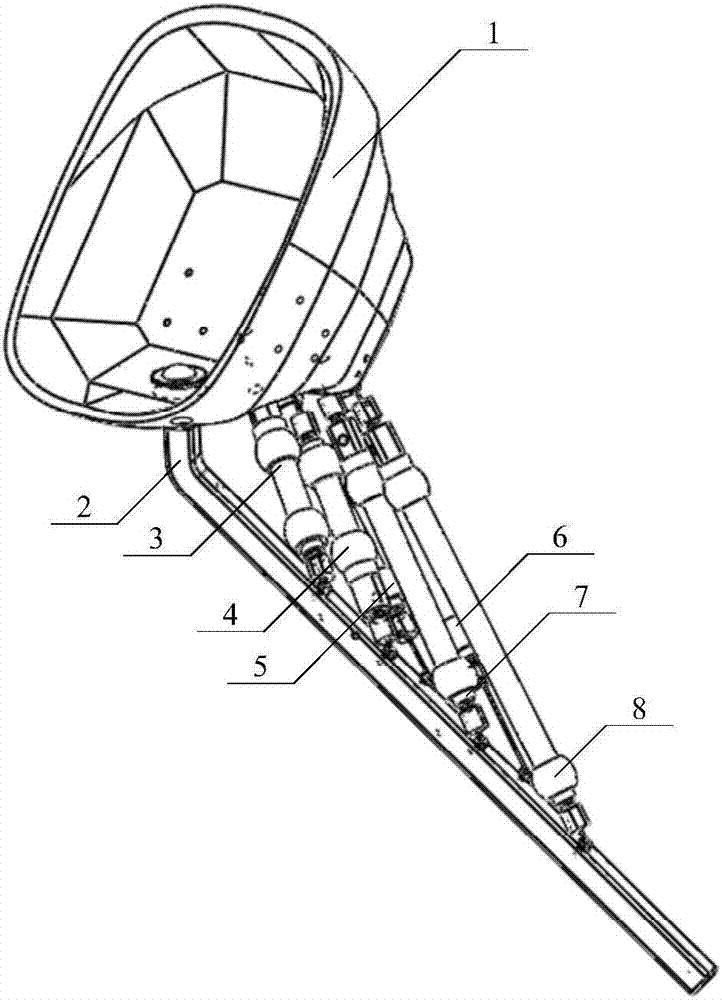
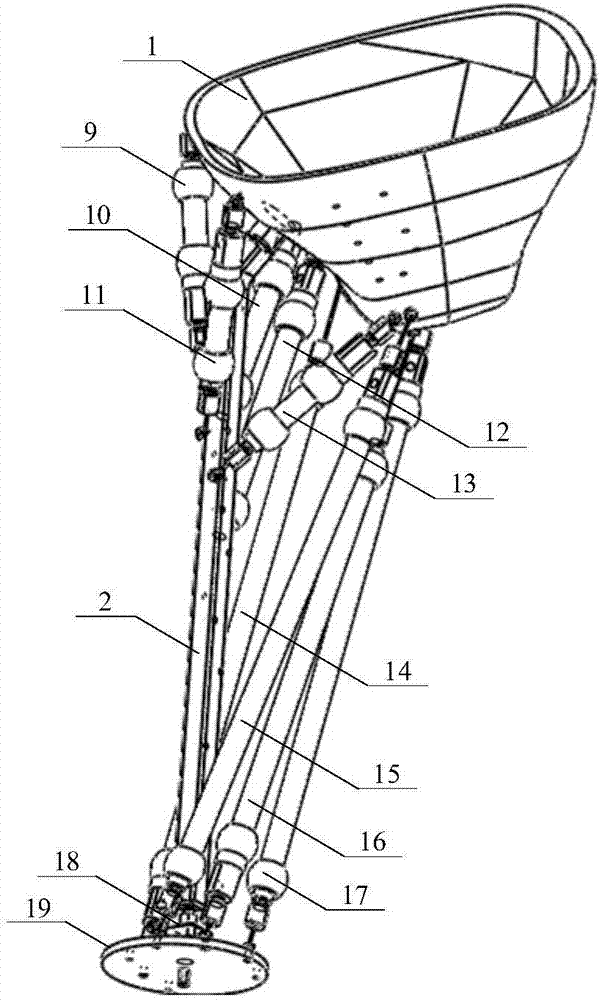
[0023] like Figure 1-4 As shown, a humanoid lower limb system based on pneumatic muscles includes pelvis 1, femur 2, obturator internal muscle 3, quadratus femoris 4, pectineus 5, adductor brevis 6, adductor magnus 7, adductor longus 8 , gluteus medius 9, piriformis 10, gluteus medius 2 11, gluteus maximus 12, iliopsoas 13, biceps femoris 14, adductor magnus 2 15, semitendinosus 16, semimembranosus 17, The first segment of the fibula 18, the connecting plate of the fibula muscle 19, the first soleus 20, the second soleus 21, the peroneus brevis 22, the anterior tibialis 23, the second segment of the fibula 24, and the foot 25.
[0024] Among them, the pelvis 1 is rotatably connected to the femur 2, and the two ends of the obturator internal muscle 3, the quadratus femoris 4, the pectineus 5, the adductor brevis 6, the adductor magnus 7, and the adductor longus 8 are respectively connected to the pelvis 1 by wire ropes. The inner side of the femur 2 can be rotatably connected...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More