

Confirming method and device for working state of robot and robot
A technology of working state and determination method, which is applied in the field of robotics, can solve the problems of low reliability of the robot control system, and achieve the effect of solving low reliability and improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0024] According to an embodiment of the present invention, a method embodiment of a method for determining the working state of a robot is provided. It should be noted that the steps shown in the flow chart of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions , and, although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
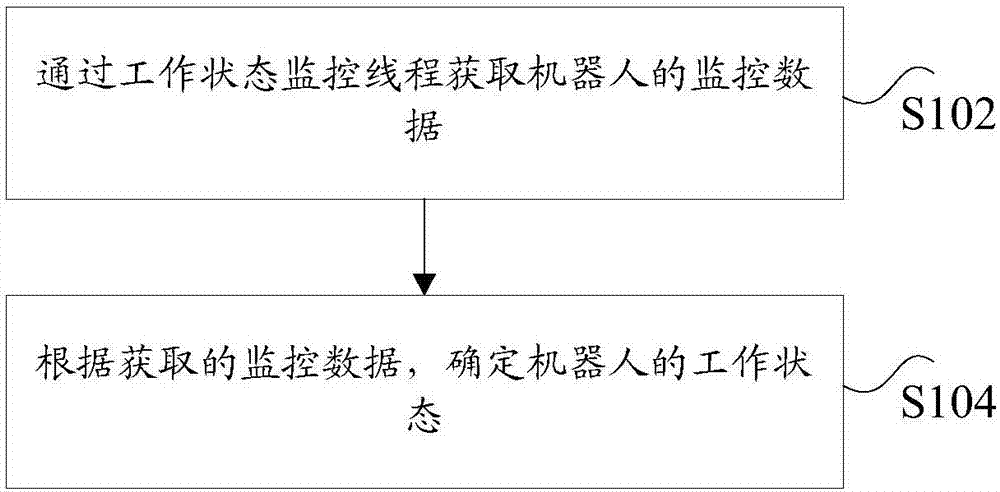
[0025] figure 1 is a flow chart of an optional method for determining the working state of a robot according to an embodiment of the present invention, such as figure 1 As shown, the method includes the following steps:
[0026] Step S102, obtaining the monitoring data of the robot through the working state monitoring thread;
[0027] Step S104, determine the working state of the robot according to the acquired monitoring data.
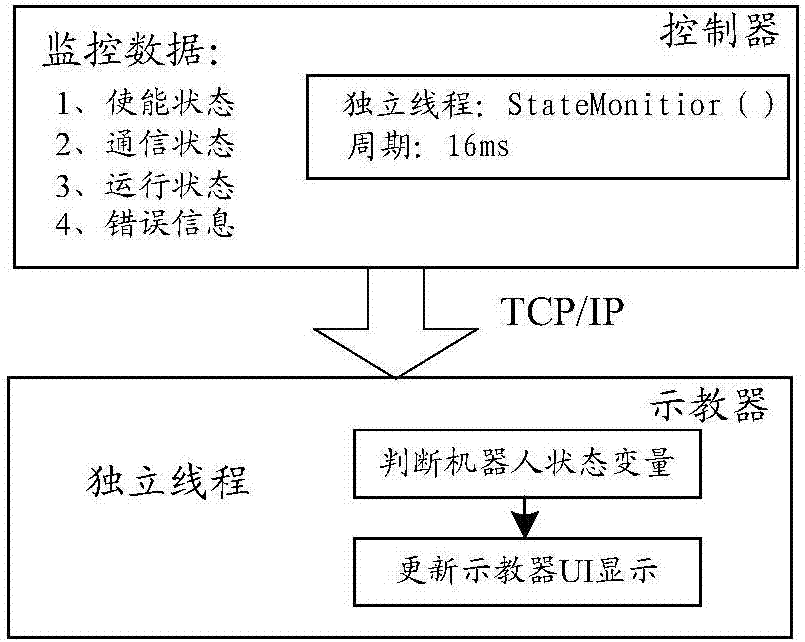
[0028] During implementation, a thread dedicated ...
Embodiment 2
[0038] According to an embodiment of the present invention, a device embodiment of a device for determining a working state of a robot is provided. It should be noted that the device for determining a working state of a robot in this embodiment of the present invention can be used to implement the working state of a robot in Embodiment 1 method of determination.
[0039] image 3 is a schematic diagram of an optional device for determining the working state of a robot according to an embodiment of the present invention, such as image 3 As shown, the device includes: an acquiring unit 302, configured to acquire monitoring data of the robot through a working status monitoring thread; a determining unit 304, configured to determine the working status of the robot according to the acquired monitoring data.
[0040]During implementation, a thread dedicated to monitoring the working state of the robot can be pre-written, that is, a working state monitoring thread, and written into...
Embodiment 3
[0048] According to an embodiment of the present invention, a device embodiment of a robot is provided. It should be noted that the robot in Embodiment 3 includes the device for determining the working state of the robot in any implementation manner in Embodiment 2, which will not be repeated here.
[0049] Through the embodiment of the present invention, an independent robot monitoring thread is used to monitor the working state of the robot, and the monitoring data of the robot is obtained through the working state monitoring thread; according to the obtained monitoring data, the working state of the robot is determined, and the use of an independent thread to monitor the robot is achieved. The purpose of this method is to achieve the technical effect of improving the reliability of the robot control system, and then solve the technical problem of low reliability of the robot control system in the related art.
[0050] The serial numbers of the above embodiments of the prese...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More