

Active intention control-based portable ankle joint rehabilitation robot
A rehabilitation robot and portable technology, which can be used in equipments to help people walk, medical science, diagnosis, etc., can solve the problems of difficult to achieve comprehensive rehabilitation of ankle joints, difficult to meet patients, etc., and achieve convenient wearing, efficient rehabilitation training, and increased comfort. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments, but it is not used as a basis for any limitation of the present invention.
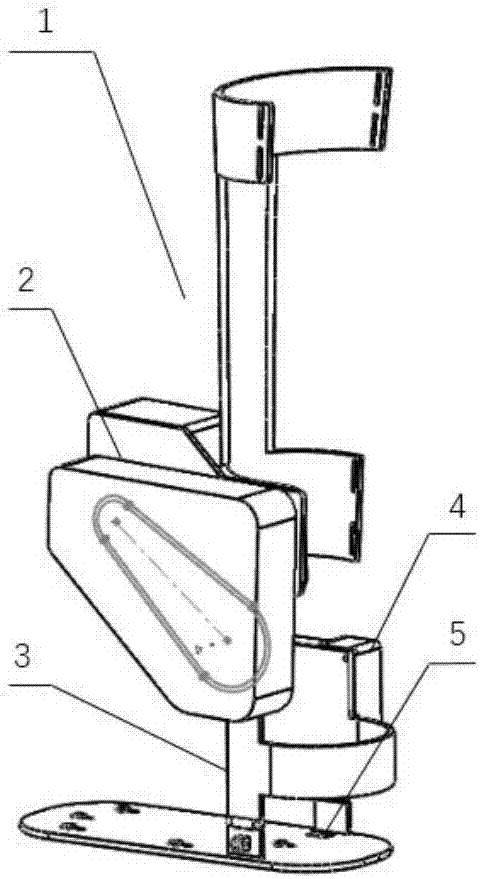
[0037] Such as figure 1 As shown, this embodiment describes that the present invention discloses a portable ankle joint rehabilitation robot based on active intention control, including a leg guard fixing mechanism 1, a walking aid mechanism 2 connected to one side of the leg guard fixing mechanism 1, and a walking aid mechanism 2 connected to the leg guard fixing mechanism 1, the foot plate mechanism 3 connected with the walking aid mechanism 2, and the gait correction mechanism 4, which is installed on the foot plate mechanism 3 and located on the right side of the whole machine, also includes the plantar pressure sensing system 5 integrated in the foot plate mechanism 3 and Microprocessor 30.
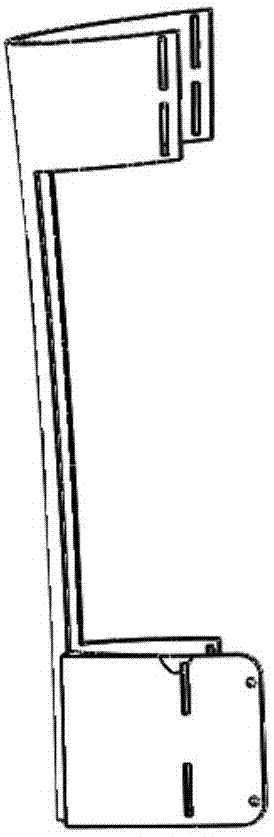
[0038] Such as figure 2As shown, using the principle of bionics, a leg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More