

Single motor driving lifting high-precision grabbing and releasing mechanical hand and control method thereof
A manipulator, high-precision technology, applied in the field of machinery, can solve the problem of a single power-driven high-precision pick-and-place manipulator, etc., and achieve the effects of high-precision positioning, high fault tolerance, and precise pick-and-place
Pending Publication Date: 2018-05-11
NCS TESTING TECH
View PDF4 Cites 1 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
However, in the published Chinese patent literature, no relevant technical revelations have been found for a single power-driven, high-precision pick-and-place manipulator
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment example
[0067] The invention has been successfully applied in a composite type X-ray fluorescence spectrometer. The instrument can detect the element content in the sample and is widely used in metallurgy, geology, building materials, environment and other fields. The invention can complete automatic sampling and unloading under the condition of unattended, which saves the physical labor of staff and greatly improves the working efficiency of the instrument.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
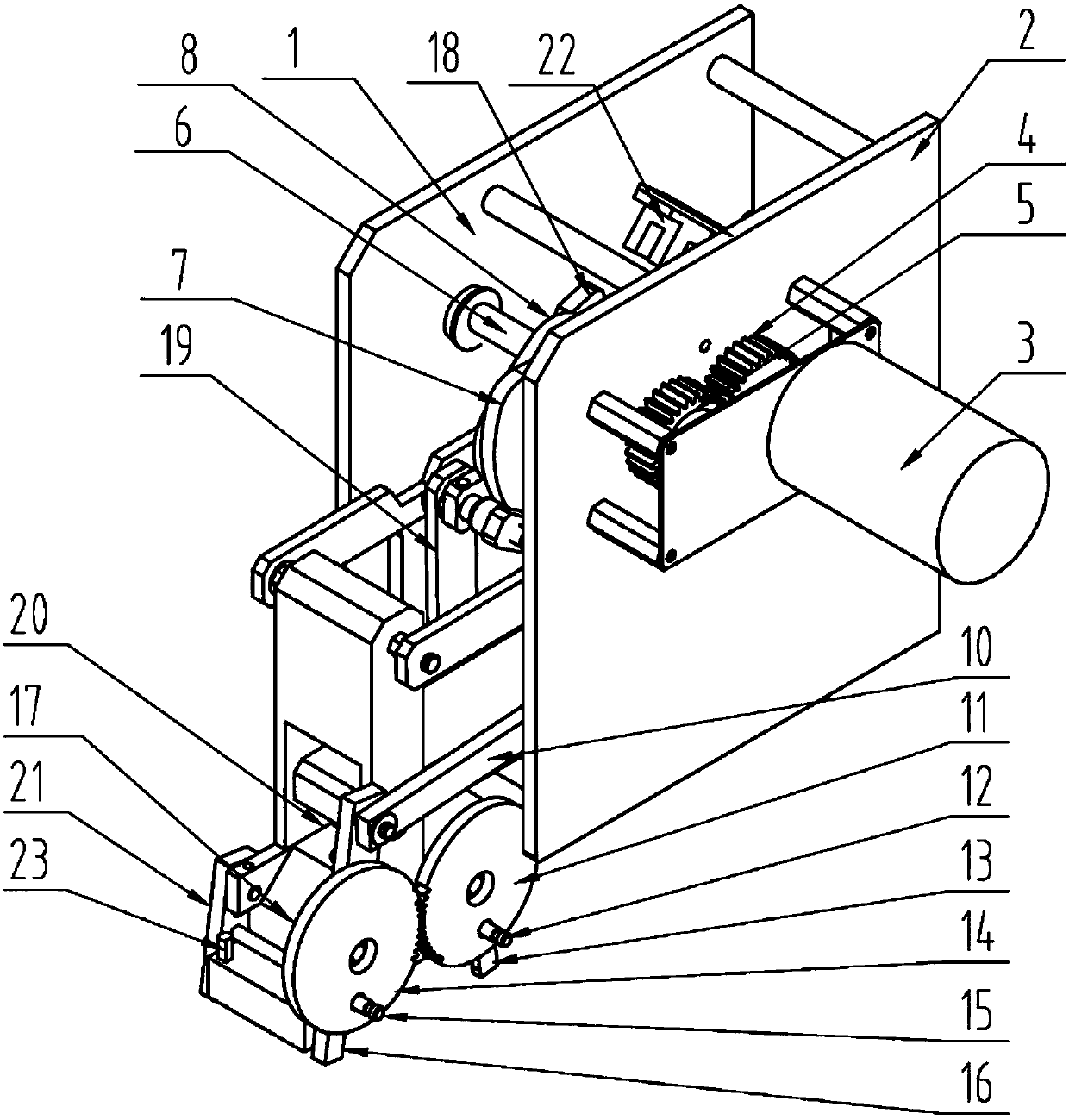
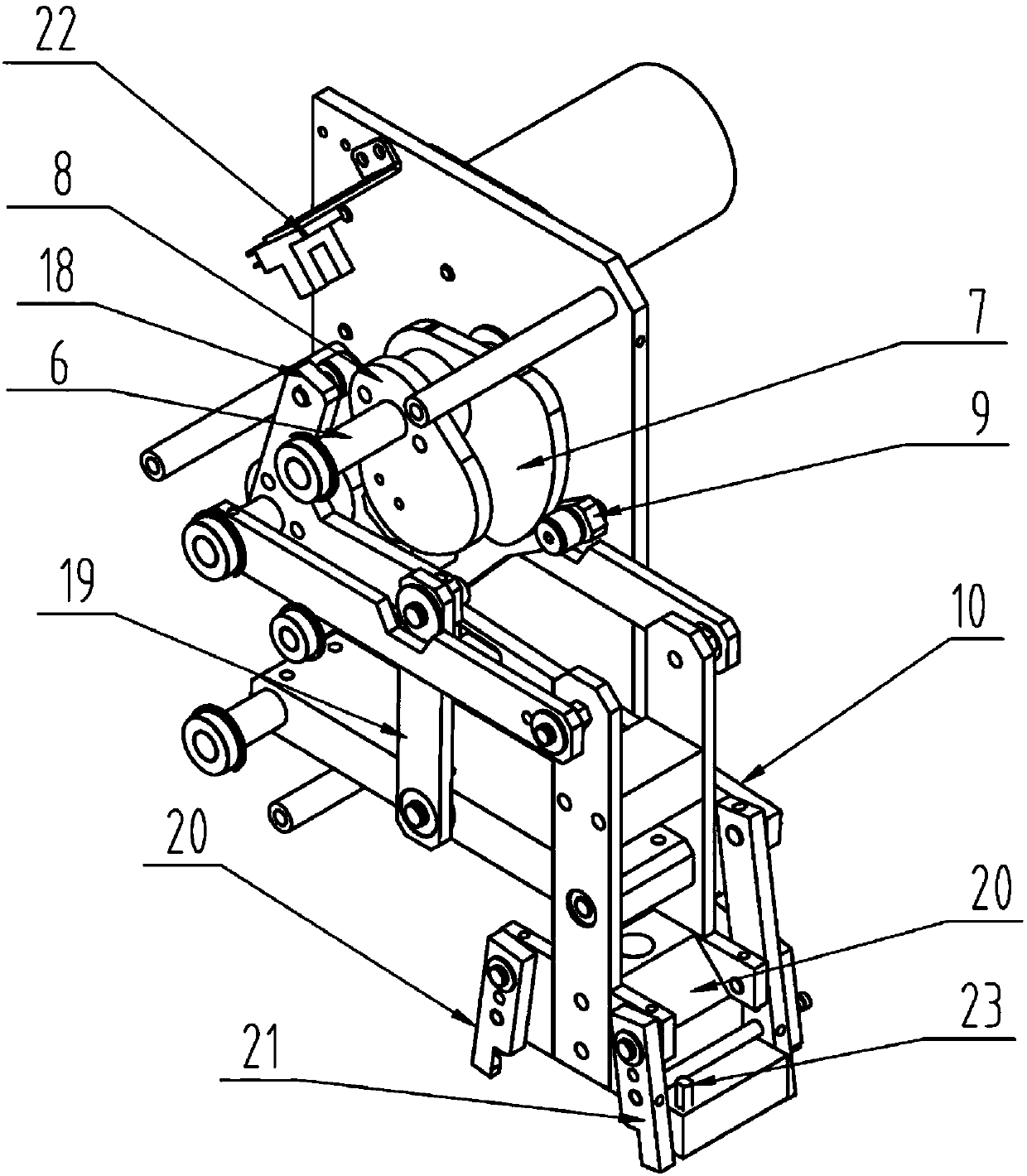
The invention relates to a single motor driving lifting high-precision grabbing and releasing mechanical hand. The single motor driving lifting high-precision grabbing and releasing mechanical hand comprises a driving module, an execution module and a control module, wherein the driving module uses a single motor as a unique power device; the execution module comprises a mechanical hand part and amechanical hand movement mechanism; the mechanical hand part comprises four arms; the four arms are pairwise connected by limiting shafts in parallel; the linkage of the four arms is realized throughsprings and two engaged semi-gears; the mechanical hand movement mechanism comprises a cam unit and multiple levers; the cam unit comprises two disc cams which are coaxially arranged and are parallelto each other; a large cam (7) is used for driving the multiple arms to simultaneously carry out inward clamping and outward stretching; a small cam (8) is used for driving the hand part to drop andlift; and the control module comprises two sensory feedback devices which are respectively used for positioning the lifting position of the mechanical hand part and judging whether an object is grabbed by the mechanical hand part. The single motor driving lifting high-precision grabbing and releasing mechanical hand is simple in structure, easy to control, is accurate in grapping and releasing andhas high reliability.
Description
technical field [0001] The invention belongs to the technical field of machinery, and in particular relates to a manipulator driven by a single motor and a control method thereof. Background technique [0002] The manipulator is an automatic operation device that can imitate the functions of the human hand and arm to complete certain predetermined actions. Its structure and performance have both the advantages of the human body and the machine, that is, flexibility and endurance, and can replace manual operations to a large extent. It is widely used in machinery manufacturing, metallurgy, electronics, light industry and even atomic energy, especially because it can work for a long time in a harmful working environment (poisonous, strong acid and alkali, radiation, etc.) to protect personal safety. and other fields. [0003] The manipulator is mainly composed of three parts: execution module, drive module and control module. The executive module is composed of a hand (the i...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): B25J9/10B25J9/12B25J9/16
CPCB25J9/102B25J9/12B25J9/1612B25J9/1633
Inventor胡学强宋春苗李瑞周超郑梦鑫
OwnerNCS TESTING TECH