

Sensorless mechanical arm collision detection method
A technology of collision detection and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of increasing factory operating costs, inconvenience, false positives and false negatives, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] Embodiments of the present invention are described in detail below. However, it should not be understood that the scope of the above subject matter of the present invention is limited to the following embodiments, and all technologies realized based on the content of the present invention belong to the scope of the present invention. In addition, it should be noted that, for the convenience of description, only parts related to the present invention are shown in the drawings but not all content.
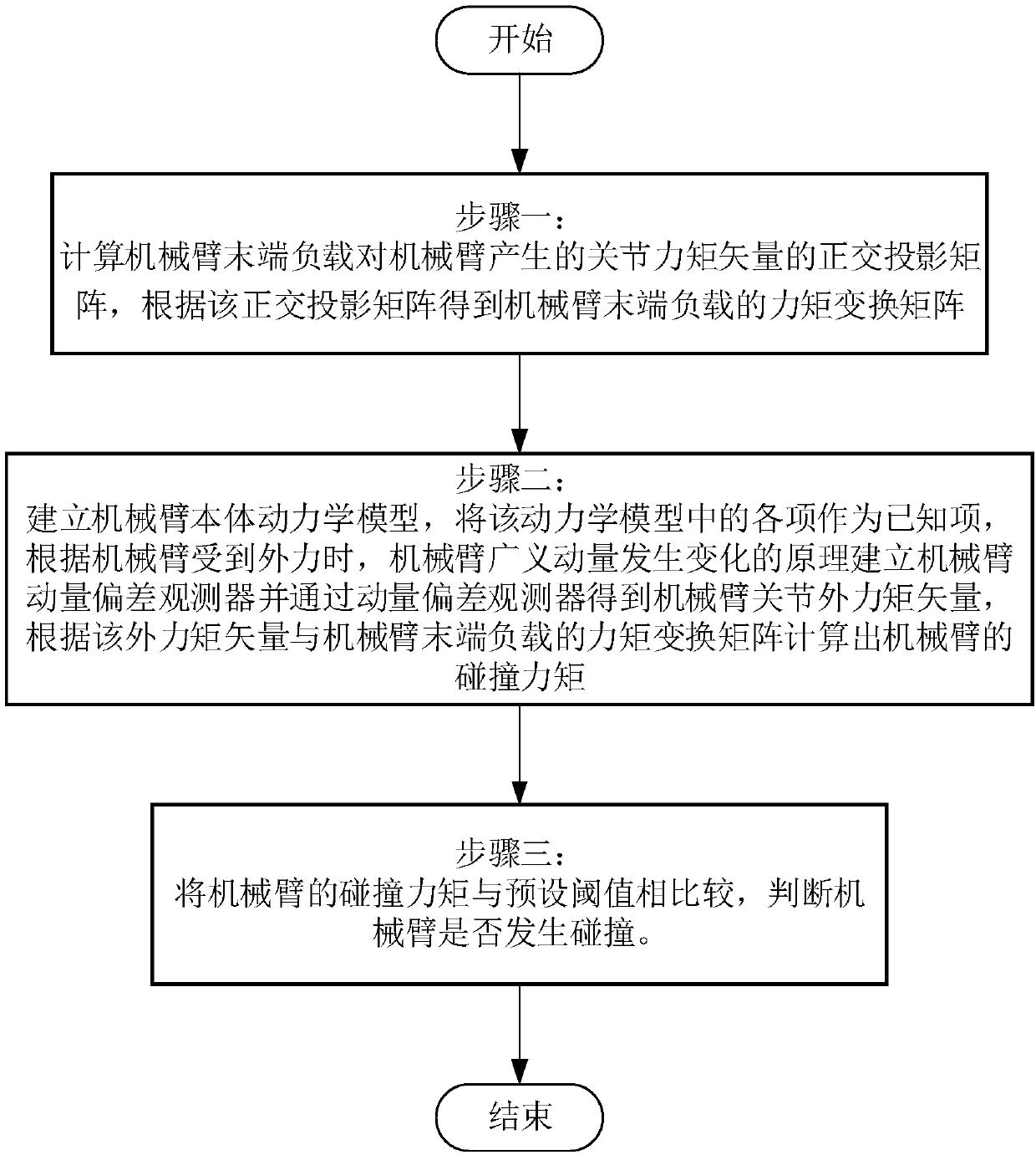
[0062] Such as figure 1 as shown, figure 1 It is a flowchart of a sensor-free robotic arm collision detection method in an embodiment of the present invention. The robotic arm body used in this specific embodiment is a seven-axis collaborative robot. The specific steps are as follows:
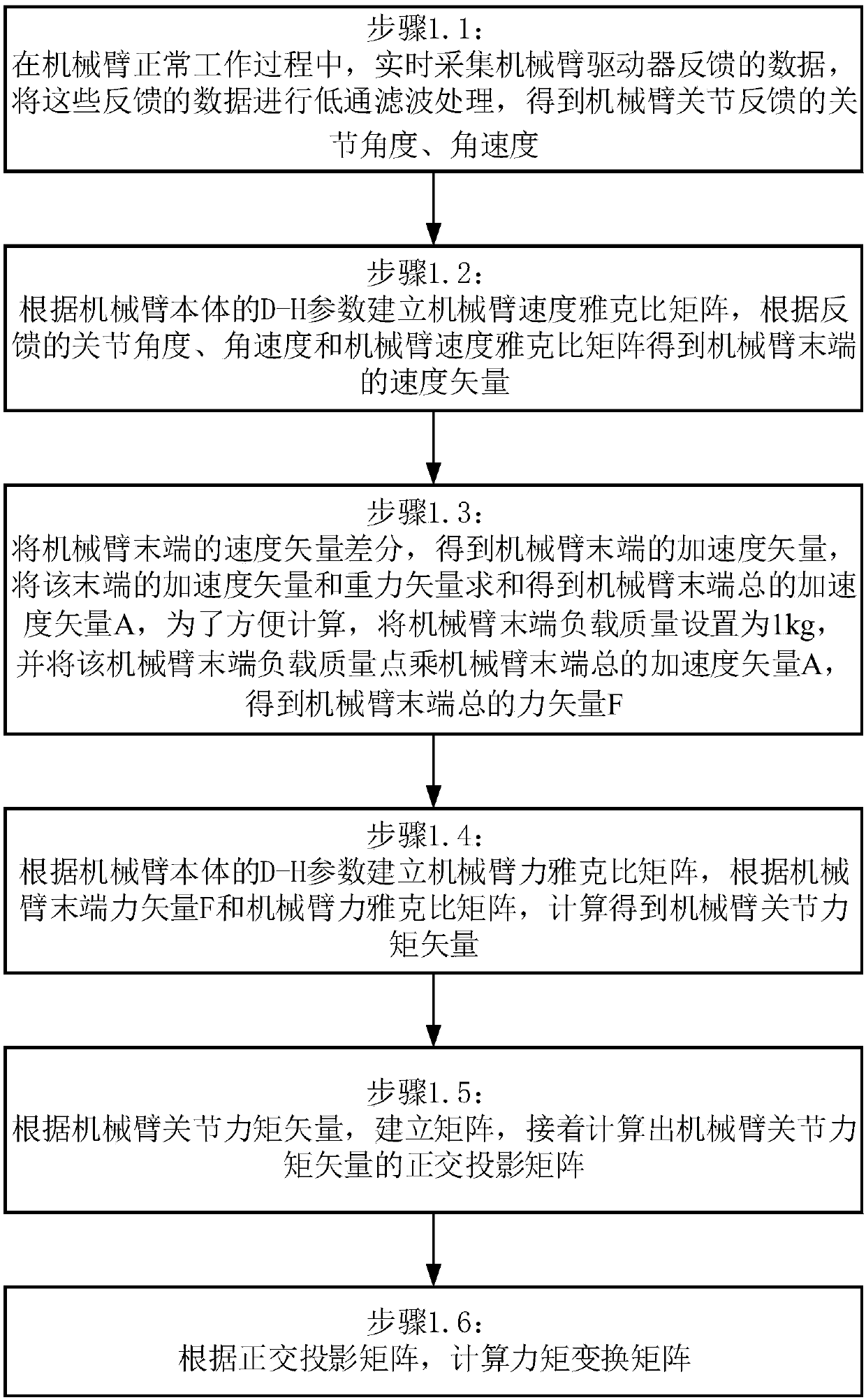
[0063] Step 1: Calculate the orthogonal projection matrix PF of the joint torque vector generated by the end load of the manipulator to the manipulator, and obtain the torque transformation m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More