Vibe and disparity map background subtraction method-based moving target detection method
A moving target, background difference method, applied in the field of computer vision, can solve the problems of poor environmental adaptability, easy to be affected by external conditions, dynamic changes, etc., to avoid lighting and shadows, and eliminate ghosting effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
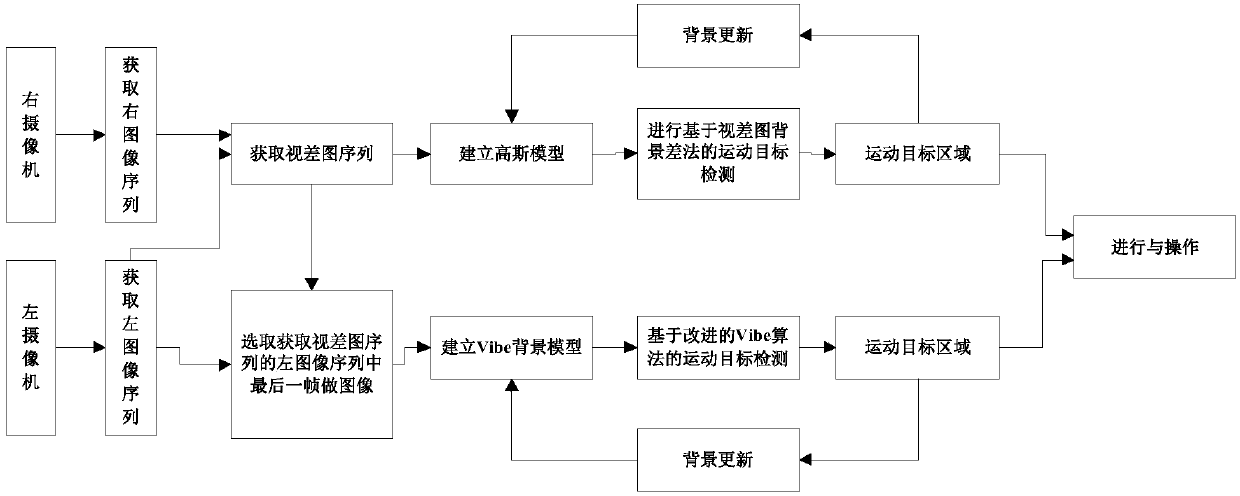
[0046] A kind of moving target detection method based on Vibe and disparity map background difference method of the present invention, its specific operation process is as follows figure 1 As shown, it mainly includes the following two steps S1-S3, and the steps S1-S3 are described in detail below:
[0047] Under the parallel binocular stereo vision system, S1 uses left and right cameras to collect images, and performs motion foreground detection based on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More