

Space manipulator kinematics parameter on-orbit calibration method based on binocular vision
A space manipulator, kinematic parameter technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the kinematic parameter change of space manipulator, useless space manipulator kinematic parameter on-orbit calibration, space manipulator cannot Complete on-orbit support and service issues normally to achieve high degree of automation, improved measurement accuracy, and good spatial adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in further detail below in conjunction with the accompanying drawings.
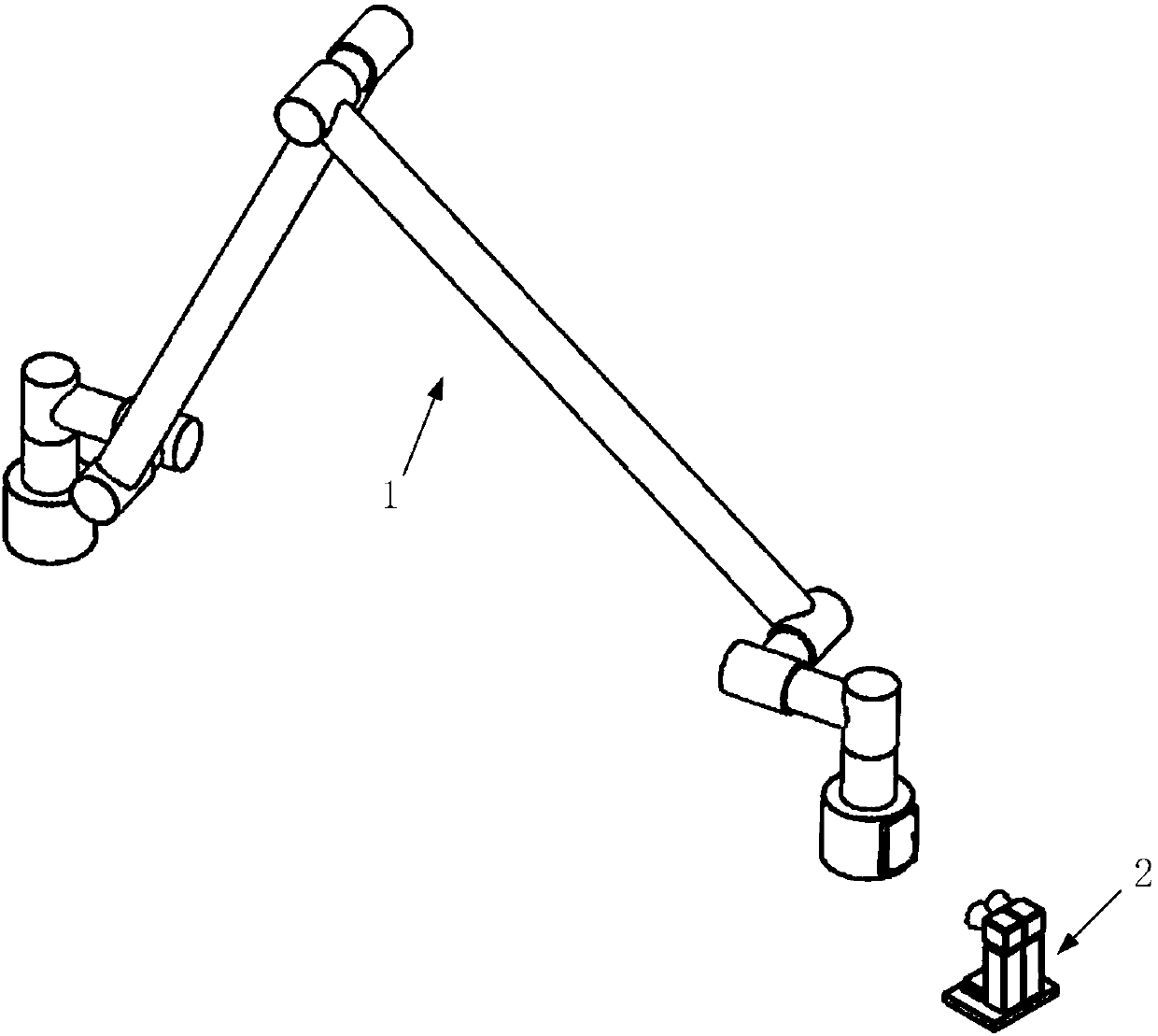
[0032] The on-orbit calibration system of the space manipulator involved in the on-orbit calibration method of the kinematic parameters of the space manipulator based on binocular vision includes the space manipulator 1 and the calibration device 2, such as figure 1 shown.
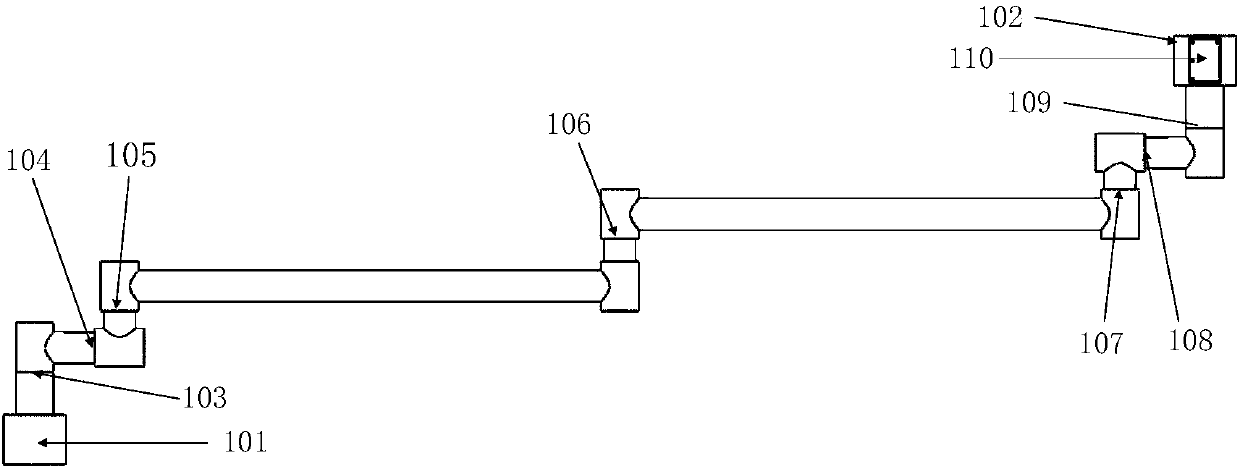
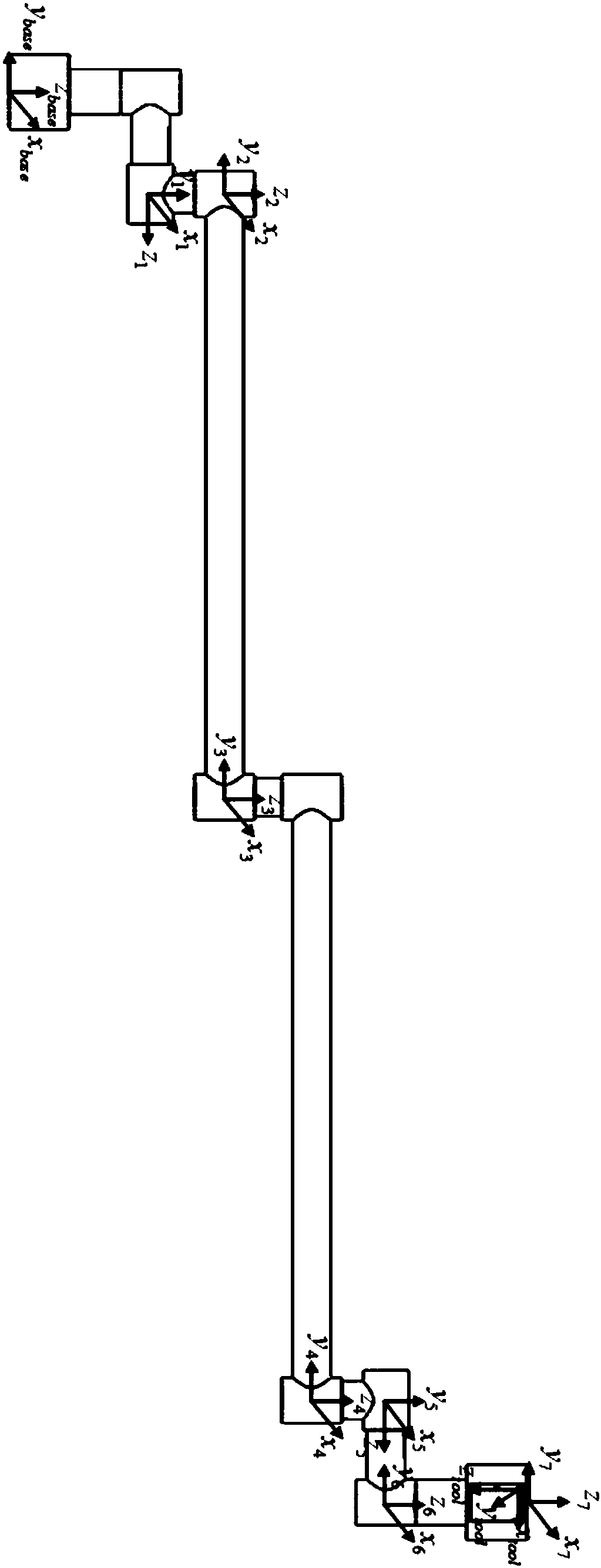
[0033] The space manipulator 1 includes a space manipulator base 101, a space manipulator end 102, and the first to seventh joints 103-109 from the manipulator base 101 to the space manipulator end 102. The space manipulator 1 passes through The base 101 of the space manipulator is installed outside the cabin of the space station, and the first to seventh joints 103 to 109 are sequentially connected through the first to sixth joint connecting rods; and the joints of the space manipulator 1 are established using the MDH method coordinate system, such as image 3 shown. The calibration d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More