

Tennis ball positioning system, method and device based on visual identification
A positioning system and tennis ball technology, applied in the computer field, can solve problems such as low work efficiency, misidentification as tennis balls, unstable picking accuracy, etc., and achieve the effect of solving misidentification problems and reducing hardware costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
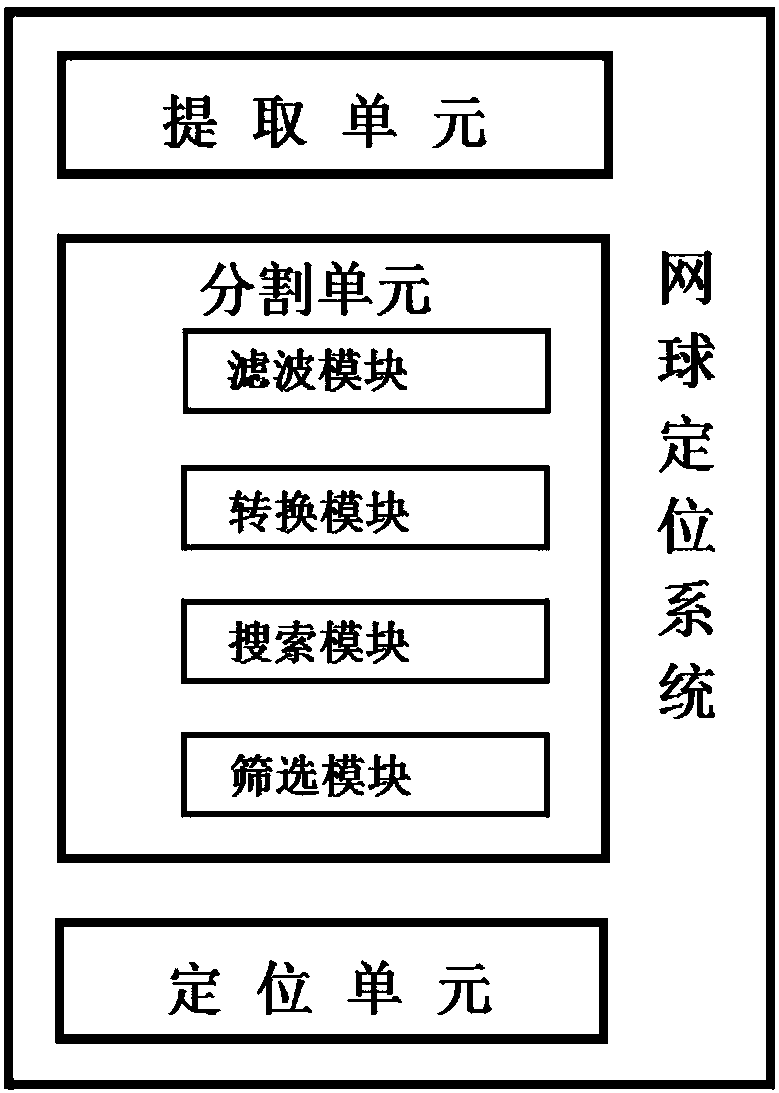
[0045] Embodiment 1: as figure 1 A tennis positioning system based on visual recognition is shown, which is characterized in that the system includes: an image extraction unit sequentially connected to extract image information in the venue, a segmentation unit that receives image information and processes the image information, and extracts from the image after identification and processing. An extraction unit of tennis outline and a positioning unit for acquiring tennis coordinates; the segmentation unit includes a filter module, a conversion module, a search module and a screening module. The extraction unit extracts the image information in the venue and sends it to the segmentation unit for processing. After the processed image is filtered, converted, searched and screened, the pixel coordinates of the center of the tennis ball are obtained. The positioning unit obtains the tennis relative in the three-dimensional coordinates of the robot.
[0046] Further, the filtering...
Embodiment 2
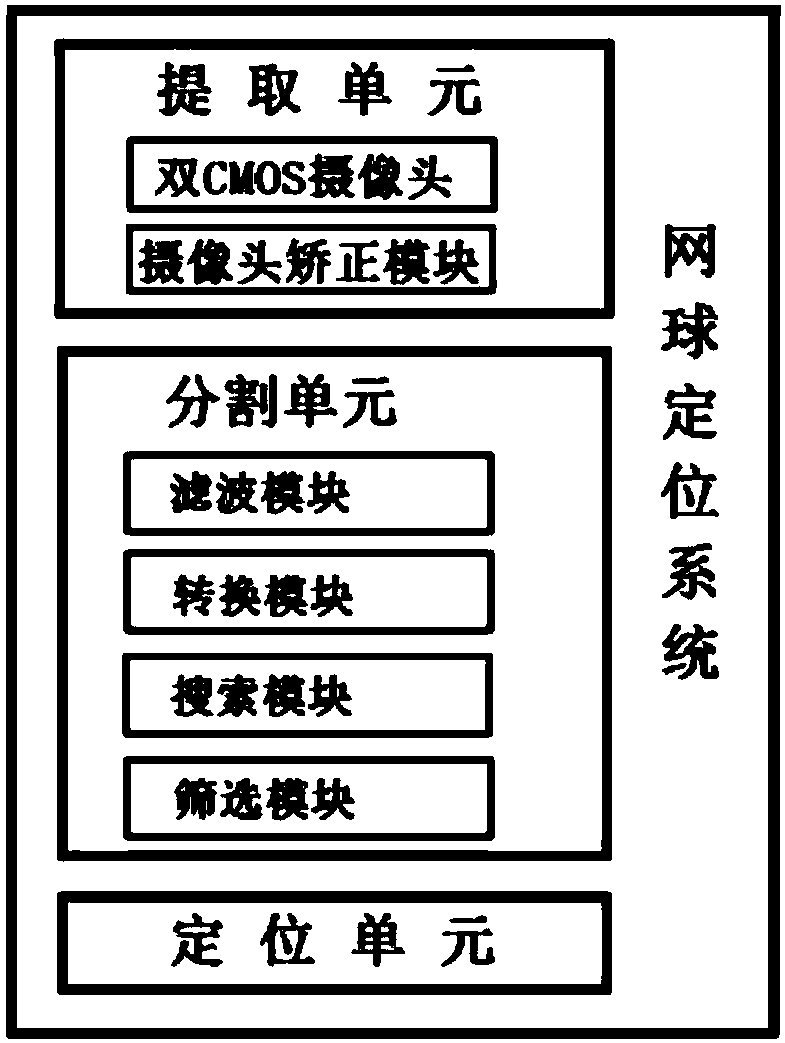
[0062] Embodiment 2: as figure 2 The shown embodiment 2 is proposed on the basis of embodiment 1, wherein the image extraction unit also includes two CMOS cameras arranged side by side and a camera calibration module, and Zhang Zhengyou calibration method is used to solve the internal and external parameters of the binocular camera. Further, the distance between the two CMOS cameras is 170 mm, and they respectively capture images within 120 degrees in front of the cameras.
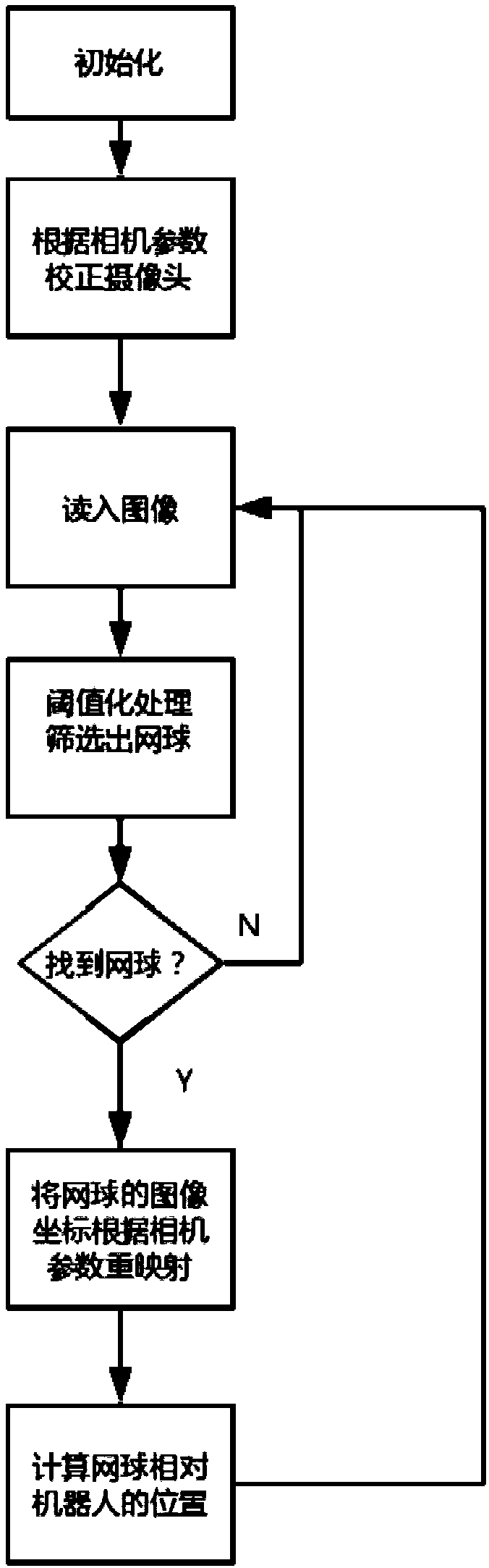
[0063] The present invention also provides a tennis ball positioning method based on the above system, including:
[0064] Step 1. Start the CMOS camera, and the two cameras simultaneously collect images of the field area and send the images to the computer;
[0065] Step 2, the computer processes the image and recognizes the tennis ball, specifically including:
[0066] converting the image into an HSV encoded image;
[0067] A morphological unit structure with a rectangular structure is constructed t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More