Stability distinguishing method of wide-area power system under influence of section variable-time delay
A technology of power system and discrimination method, applied in the field of power system, can solve the problems of reducing conservatism and inaccurate model description.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0129] A method for judging the stability of a wide-area power system under the influence of interval-variable time-delays, comprising the following steps:
[0130] Step1. Establish a time-delay power system function model including a wide-area control loop:
[0131]
[0132] Where: x(t)∈R n is the state variable of the power system, x(t-h(t)) is the state variable after time delay, A, A 1 is the system matrix, is a continuous initial phasor function on [-h, 0]; the delay h(t) satisfies:
[0133] 0≤h(t)≤h
[0134]
[0135] Among them, the constant h>0 is the upper bound of the time delay of the system; the constant μ 1 , μ 2 are the upper and lower bounds of the delay derivative.
[0136] When there is a disturbance in the system, the system (1) becomes as follows:
[0137]
[0138] Suppose: [ΔA, ΔA 1 ] = HF 0 [E a ,E b ], ΔA, ΔA 1 is the disturbance term of the system, H, E a ,E b is a constant matrix of known dimension, F 0 is a changing matrix that ...
example 1
[0236] Example 1: Consider the time-varying delay system (1), where:
[0237]
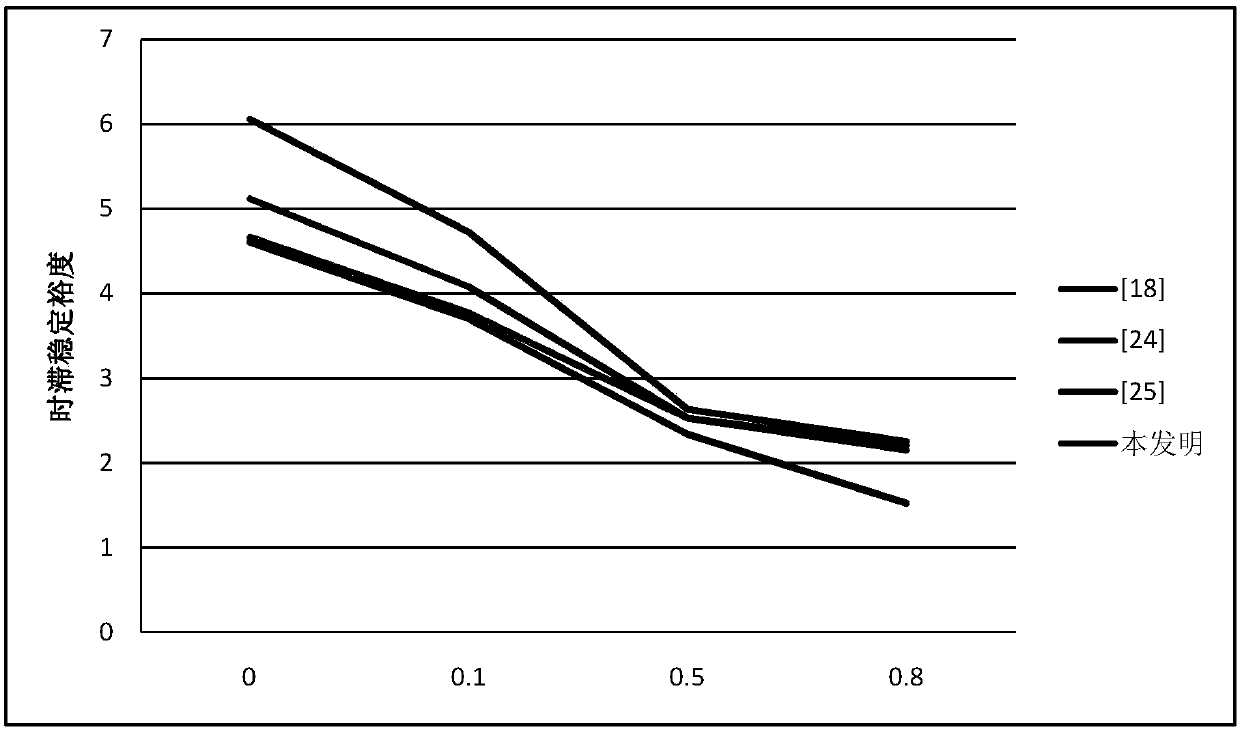
[0238] when h 1 =0, μ=0.5, according to the conclusion in literature [11], the upper bound of the time lag obtained is 2.42, and the upper bound of the time lag obtained by the method of the present invention is 2.63. In addition, Table 1 gives in μ(μ=-μ 1 =μ 2 ) takes different values, the maximum time-delay upper bound to ensure system stability is obtained by using different methods. It can be seen that, using the theorem of the present invention, when μ=0, the upper bound of the time delay is 6.0594; when μ=0.1, the upper bound of the time delay is 4.7261; when μ=0.5, the upper bound of the time delay is 2.6317, and μ=0.8 When , the upper bound of the time delay is 2.2539, which is higher than the maximum time delay value obtained by using the method in literature [18, 24, 25].
[0239] Such as figure 1 As shown, the stable operating regions of the system obtained by using different met...
example 2
[0242] Example 2: Consider the time-varying delay system (1), where:
[0243]
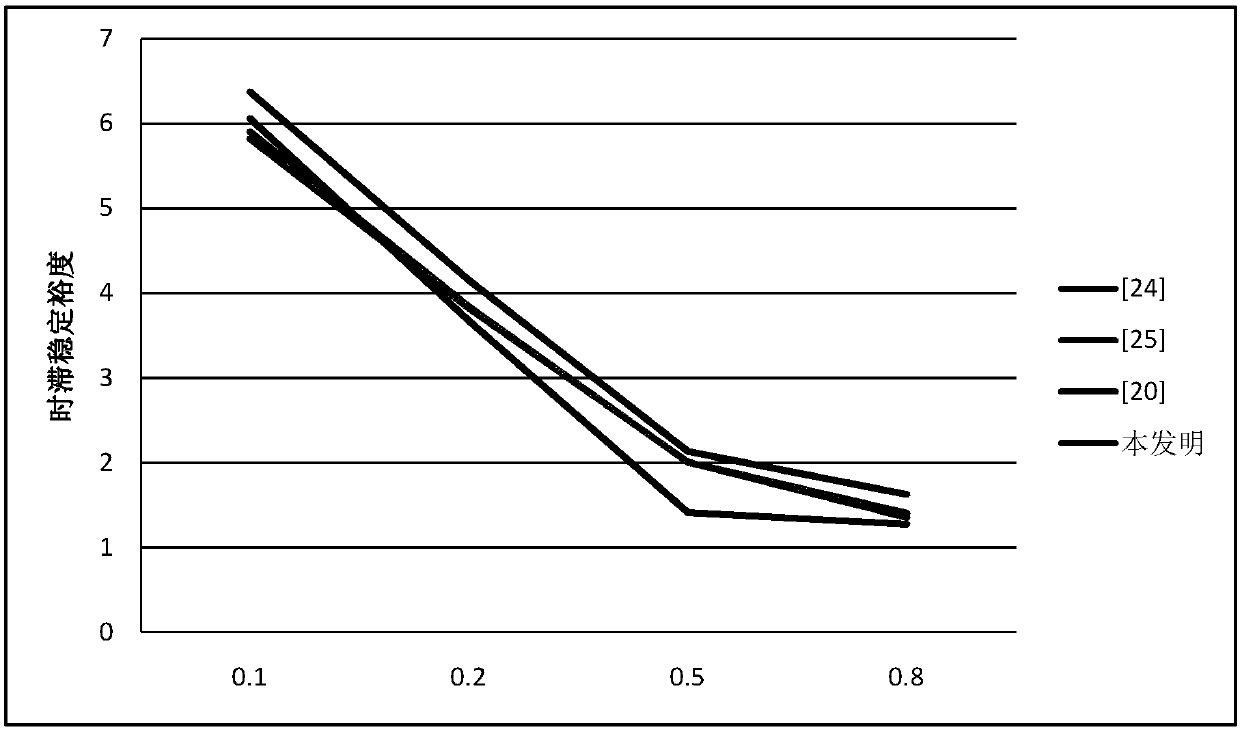
[0244] As shown in Table 2, when μ is 0.1, 0.2, 0.5, and 0.8 respectively, the upper bounds of the maximum time lag given by different methods.
[0245] Table 2 The maximum time lag at different μ values
[0246] mu
[0247] Such as figure 2 As shown, the stable regions of different systems are given. It is easy to see that compared with literature [20, 24, 25], the theorem of the present invention reduces the degree of conservatism of the system stability criterion and effectively expands the stable operation area of the system.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More