

Feeding and discharging connecting rod manipulator with tail end turnover function
A connecting rod manipulator and function technology, applied in the field of manipulators, can solve the problems of lower precision of the manipulator end, high price of industrial manipulators, high manufacturing and maintenance costs, and achieve the effects of reducing control difficulty, reducing deformation, and low production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art.
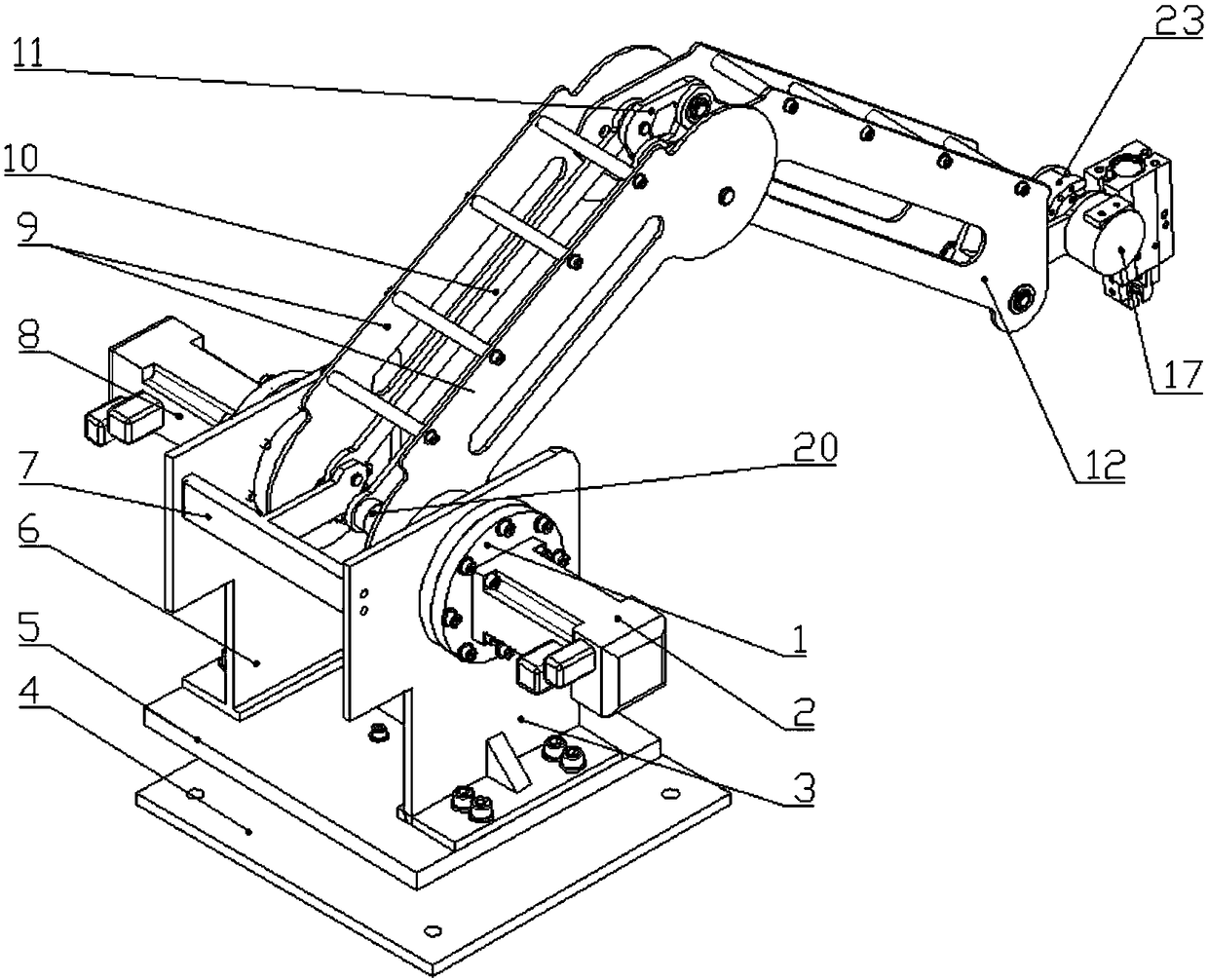
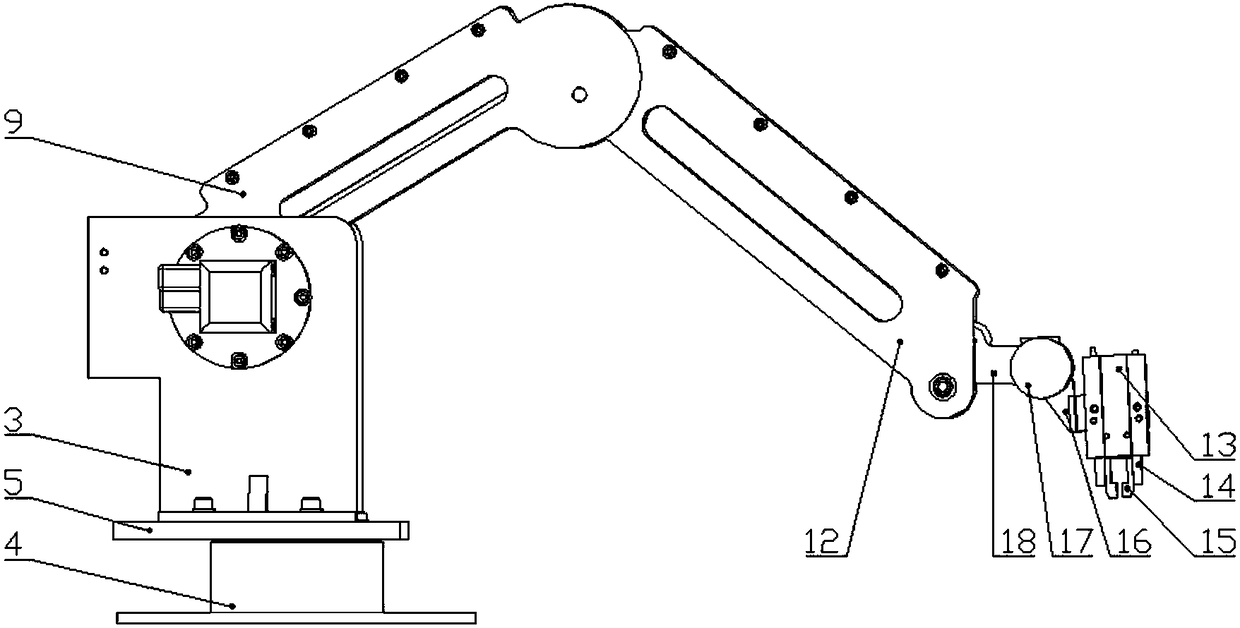
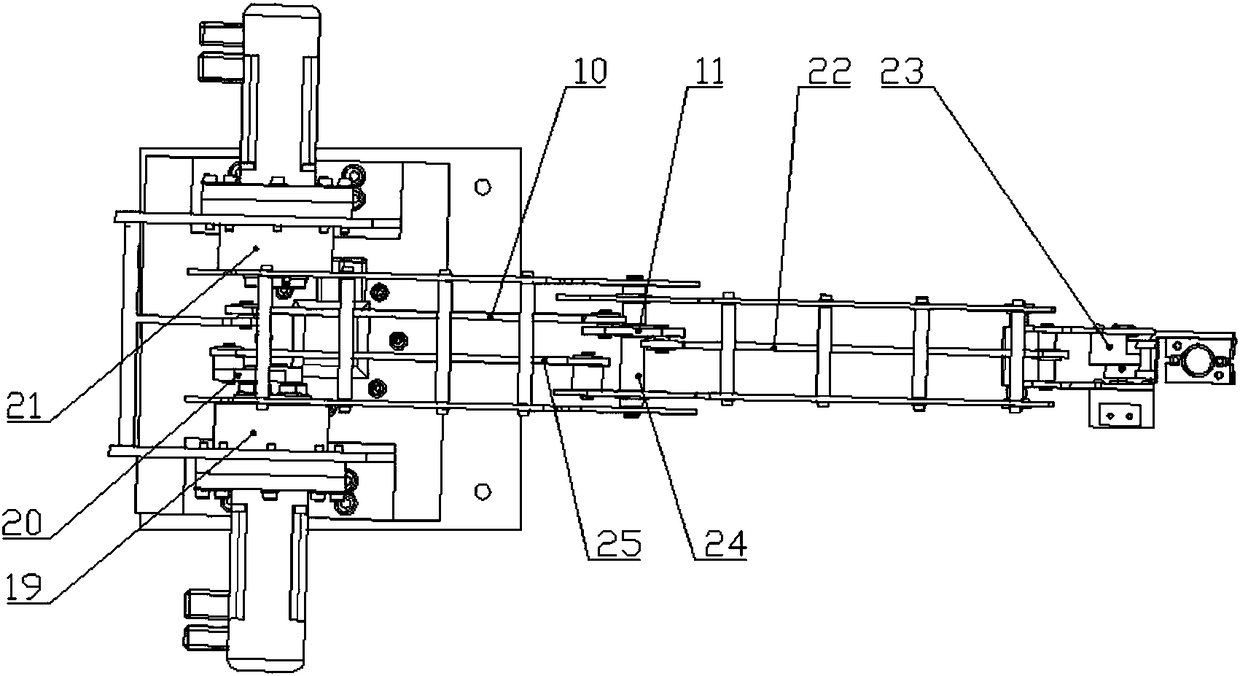
[0029] Such as figure 1 , figure 2 , image 3 As shown, the present invention provides a loading and unloading link manipulator with end turning function, including a base turning mechanism, a mechanical arm, a transmission mechanism, a wrist turning mechanism and pneumatic fingers. The mechanical arm includes a large arm 9 and a small arm 12. The large arm 9 and the small arm 12 are composed of two left and right arm plates connected by an arm connecting shaft. The large arm 9 and the small arm 12 are connected by a large and small arm connecting shaft 24. Form the rotating pair that can rotate around the large and small arms connecting the moving shaft 24. The wrist turning mechanism includes a swing cylinder 17, a fla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More