

A path planning method for unmanned vehicles based on flow field
A path planning, unmanned vehicle technology, applied in the directions of road network navigators, navigation calculation tools, etc., can solve problems such as uneven paths, inability to achieve good results, and inability to apply non-integrity systems, achieving strong solving ability, Completeness is good and the effect of ensuring executable
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0048] Such as Figure 14 As shown, a path planning method for unmanned vehicles based on the flow field includes the following steps:
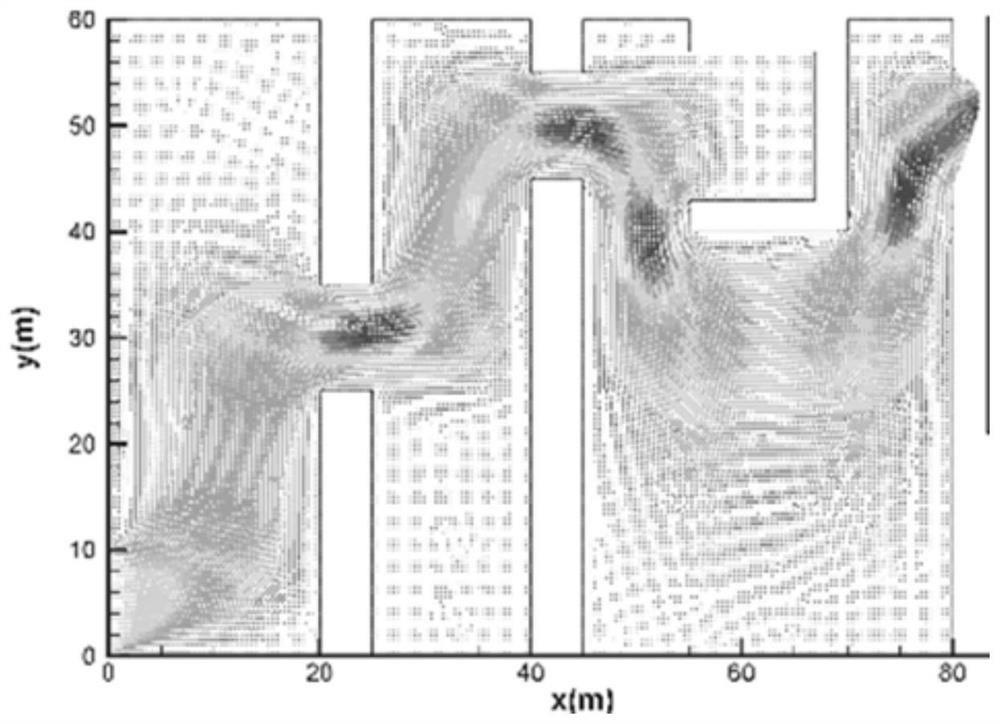
[0049] Establish a flow field calculation model based on the starting point, ending point and obstacles in the environment of the vehicle;
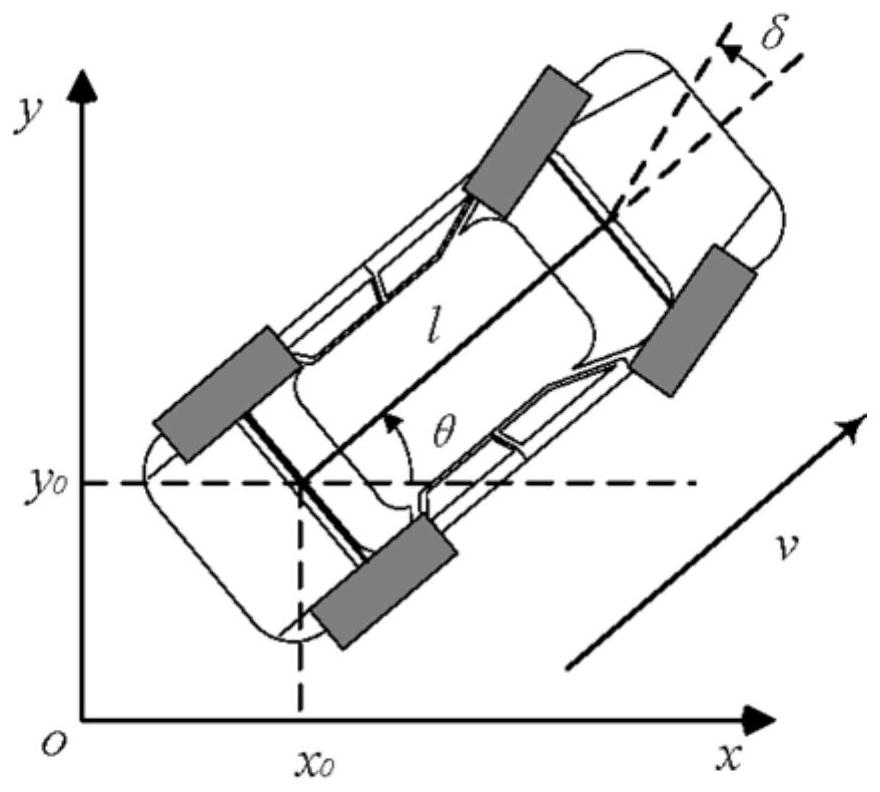
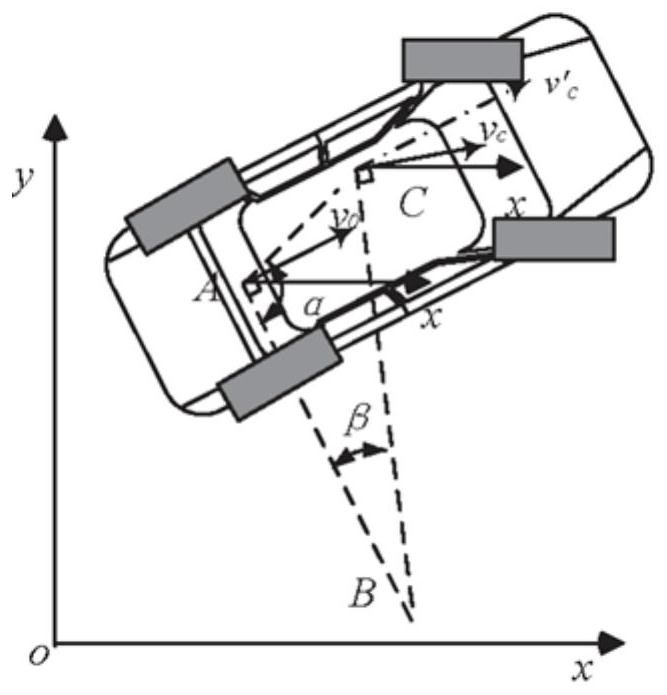
[0050] The front wheel rotation angle is used as the input quantity, the coordinates and heading angle are used as the state quantity, and the vehicle kinematics model is established;
[0051] The vehicle kinematics model is used as the rolling equation to solve the rolling time-domain optimization problem of the flow field, and the velocity vector distribution of the flow field is used as the guiding information for path planning to obtain the planned path. The optimization amount is the front wheel angle, and the optimization target includes the vehicle motion It is consistent with the flow field movement and the vehicle does not collide with obstacles during the movement process. The constraint condi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More