Laser data-based substation foreign object identification method
A recognition method and substation technology, applied in image data processing, character and pattern recognition, reradiation of electromagnetic waves, etc., can solve problems such as being easily affected by the surrounding environment, unstable recognition results, and decline in recognition results, and achieve color purity. , high power density, strong directional effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
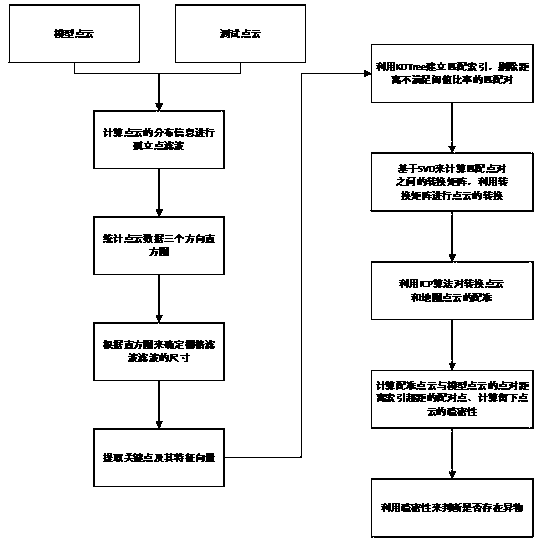
[0041] A method for identifying foreign objects in a substation based on laser data. The steps of the identification method are as follows: First, laser data is collected from multiple areas using laser radar, and a model point cloud collection is built through analysis and sorting, such as figure 2 As shown, secondly, the laser radar is used to collect laser data for a certain area to be measured to form a test point cloud, as shown in image 3 As shown, the point cloud distribution information is calculated and filtered to remove isolated points, and then the distribution histogram of the point cloud data in the three directions of the xyz axis is counted, the key points are extracted through uniform sampling filtering and the feature vector is calculated, and the kdtree matching pair index is established , solve the transformation matrix through SVD, and convert the coordinates of the test point cloud and the model point cloud for ICP iterative registration, then calculate ...
Embodiment 2
[0043] According to the method for identifying foreign objects in a substation based on laser data described in Embodiment 1, the steps of performing isolated point removal and filtering on the point cloud distribution information are as follows: for each point P, K neighbor points will be obtained with R as the search radius , calculate the distance Di from all K neighbors to P, and sum all the distances to get D,
[0044]
[0045] and the mean distance M,
[0046]
[0047] Calculate the distance square sum S of the K nearest neighbor points,
[0048]
[0049] Compute the covariance Var,
[0050]
[0051] and the mean square error,
[0052]
[0053] After the above calculation, the filtering threshold T can be calculated:
[0054]
[0055] Bring the threshold T back and compare it with the previously calculated distances Di of the K nearest neighbors. If it is less than the threshold, set the reserved flag, traverse all the points once, and count the flags ...
Embodiment 3
[0057] According to the substation foreign matter recognition method based on laser data described in embodiment 1 or 2, the method steps of the described distribution histogram are as follows: obtain three histogram distributions Fx, Fy, Fz, and calculate the excess in the three histograms respectively 75% of the distribution range of the test point cloud has been obtained, and the dimensions L1, L2, and L3 required to divide the range into 10 equal parts are obtained. After calculating the average value Lm of L1, L2, and L3, the entire test point cloud data can be uniformly sampled The scale Lm, such as Figure 8 shown.
[0058]
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More