

Non-contact robot human-robot interaction system based on multi-sensor integration
A multi-sensor fusion and non-contact technology, applied in the field of robotics, can solve problems such as limited range of motion and unnatural interaction process, and achieve the goals of improving naturalness, increasing safety and reliability, reducing space constraints and operating skills required effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The technical solutions provided by the present invention will be described in detail below in conjunction with specific examples. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
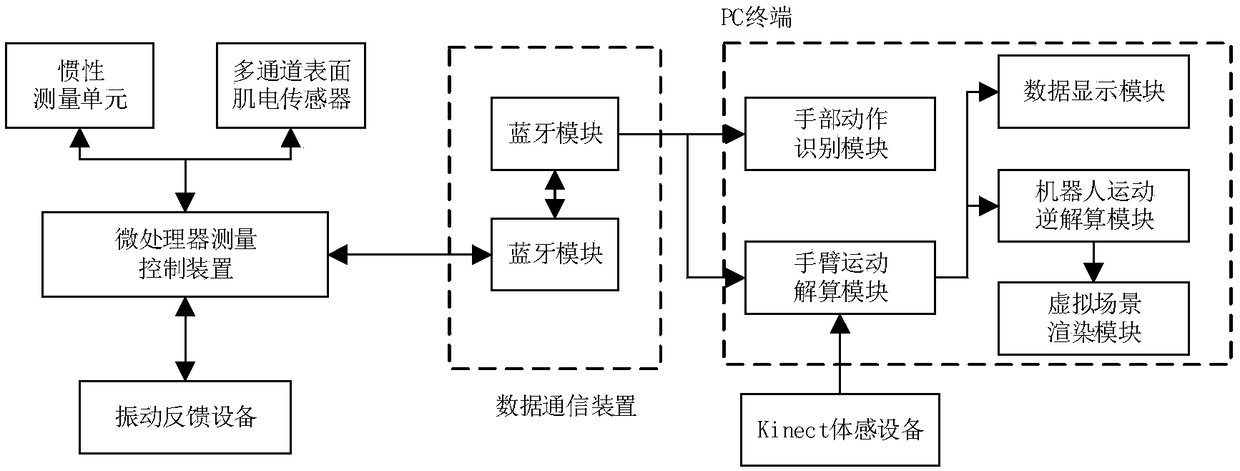
[0024] Such as figure 1 As shown, the non-contact robot human-computer interaction system based on multi-sensor fusion provided by the present invention includes: multi-channel surface electromyography sensor, inertial measurement unit, microprocessor measurement control device, data communication device, Kinect somatosensory equipment, vibration Feedback devices and PC terminals. The multi-channel surface electromyography sensor is arranged on the forearm of the operator's arm to collect electromyography signals. The inertial measurement unit is arranged on the forearm of the operator's arm, and is used for measuring the posture angle of the forearm of the arm....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More