

BRDF normalizing correction method for airborne push-broom hyperspectral image of forest region
A correction method and push-broom technology, applied in the field of forestry informatization, to achieve the effect of clear logic and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0039] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
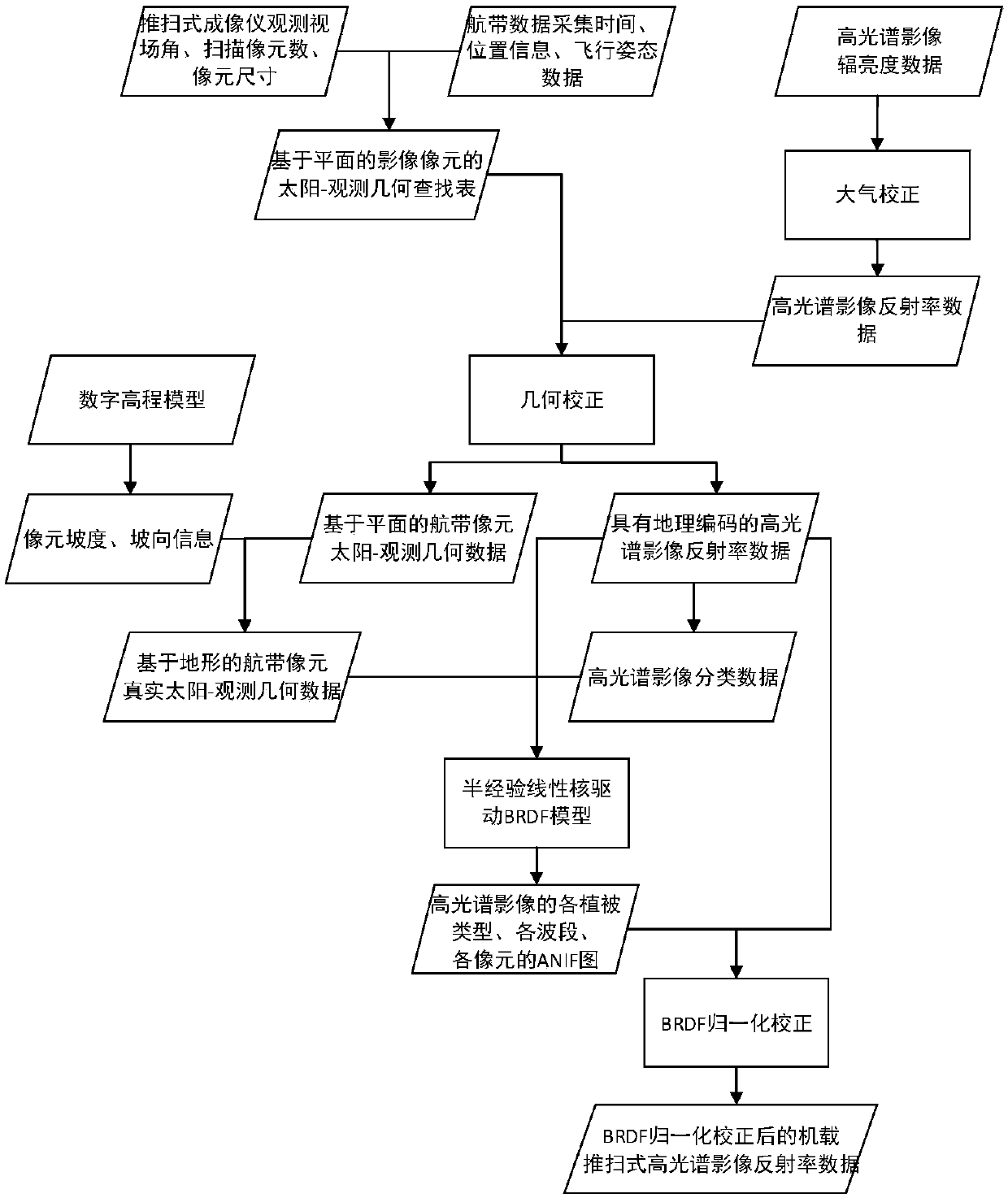
[0040] like figure 1 As shown, a binomial reflectance distribution function (BRDF) normalization correction method for airborne push-broom hyperspectral imagery in forested areas with undulating terrain, the specific implementation steps are as follows:
[0041] Step 1: Calculate the solar-observation geometry of the pixel
[0042] Relative to images, the solar zenith angle refers to the angle between the direct rays of the sun and the vertical line at the gr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More