

Flexible obstacle avoidance method, system and terminal equipment for a robotic arm
A robotic arm and obstacle avoidance technology, applied in the field of robotic arms, can solve problems such as damage, deformation of the robotic arm, and increased maintenance costs of the robotic arm, achieving the effects of reducing failure rates and protecting integrity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
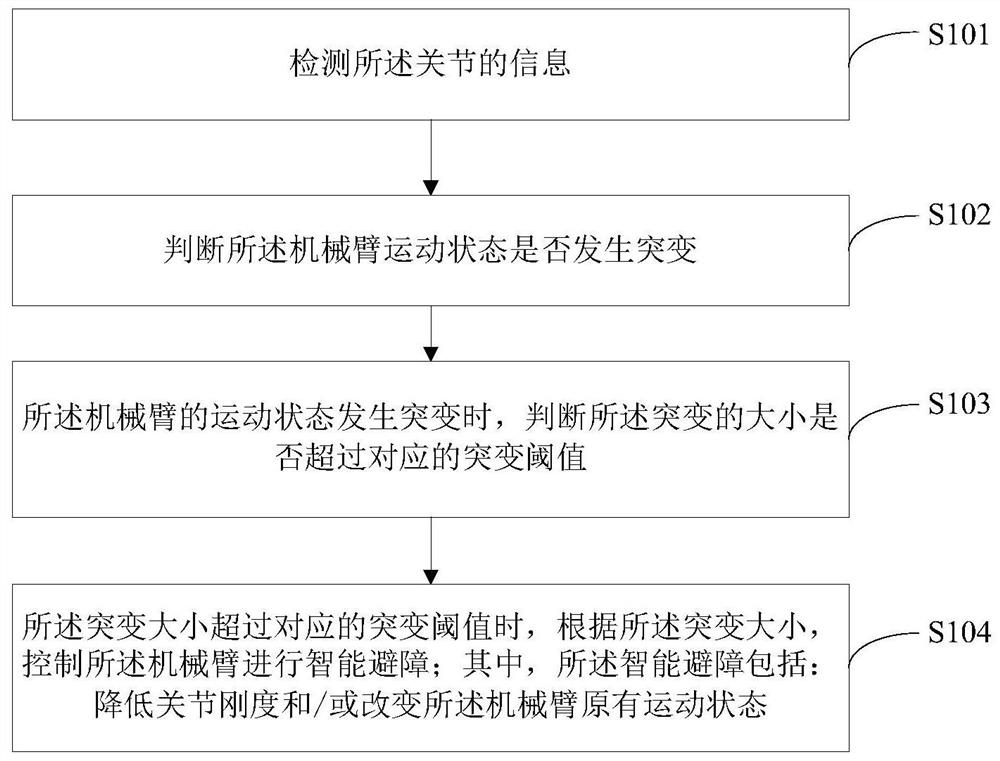
[0032] Such as figure 1 As shown, this embodiment provides a method for flexible obstacle avoidance of a robotic arm, and the robotic arm includes several joints; wherein, the number of the joints is determined by the specific structure classification or the classification of the working nature of the robotic arm. This method can be applied to terminal devices such as robots and manipulators. The flexible obstacle avoidance method of the robotic arm provided in this embodiment includes:
[0033] S101. Detect information about the joint.
[0034] S102. Determine whether a sudden change occurs in the motion state of the robotic arm.
[0035] In a specific application, the sudden change in the motion state of the mechanical arm refers to the situation that the torque magnitude, current signal strength or pressure magnitude detected by the robotic arm suddenly increases or decreases within a short period of time.
[0036] S103. When a sudden change occurs in the motion state of...
Embodiment 2
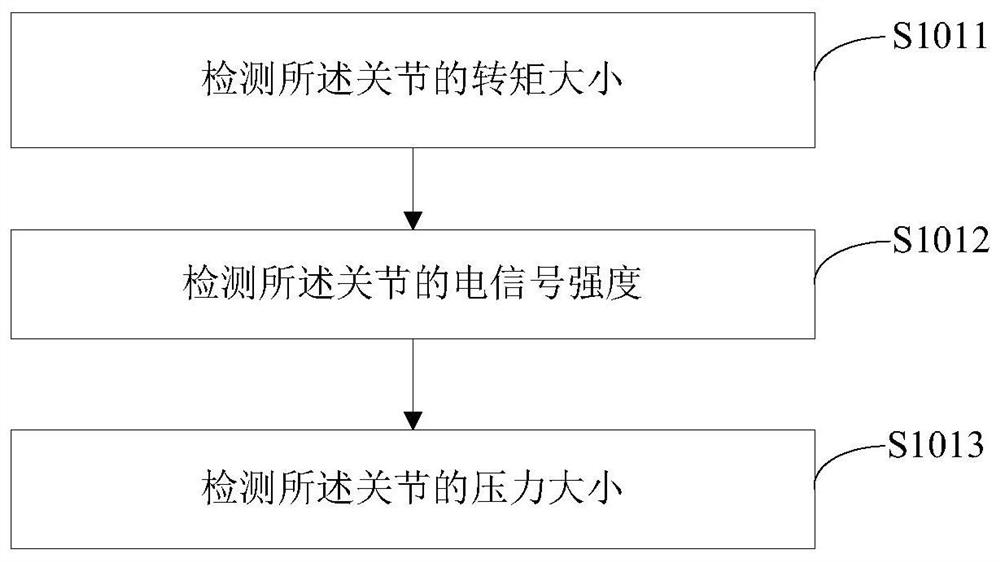
[0049] Such as figure 2 As shown, this embodiment is a further refinement of step S101 in Embodiment 1. In this embodiment, step S101 includes:
[0050] S1011. Detect the magnitude of the torque of the joint.
[0051]In a specific application, the torque of the mechanical arm refers to the torque that makes the mechanical element rotate, which is called the rotational torque, or torque for short. Mechanical components will produce a certain degree of torsional deformation under the action of torque, so torque is sometimes called torque. Torque is the basic load form of transmission shafts of various working machines. It is closely related to factors such as working capacity, energy consumption, efficiency, operating life and safety performance of power machinery. The strength design of the working parts of the system and the selection of the prime mover capacity are of great significance. In addition, the relationship between torque and power is T=9549P / n or T=P / Ω (Ω is t...
Embodiment 3
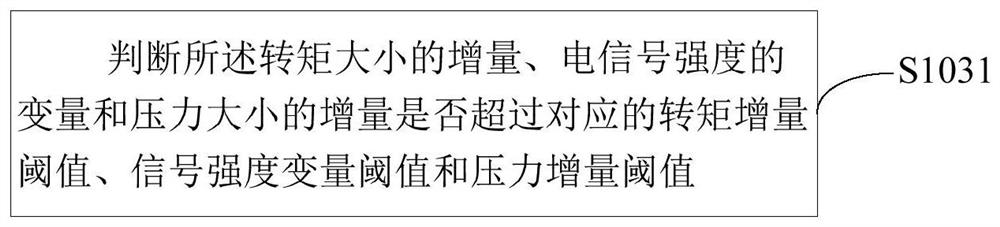
[0058] Such as image 3 As shown, this embodiment is a further refinement of step S103 in Embodiment 1. In this embodiment, step S103 further includes:
[0059] S1031. Determine whether the torque increment, the electrical signal strength variable, and the pressure increment exceed the corresponding torque increment threshold, signal strength variable threshold, and pressure increment threshold.
[0060] In specific applications, the torque increment threshold, signal intensity variable threshold, and pressure increment threshold can be set according to actual needs. The torque increment threshold refers to the condition that the mechanical components of the manipulator are not damaged or deformed. Next, the maximum torque that the mechanical element can withstand. The signal strength variable threshold refers to the maximum or minimum current signal strength that the mechanical component can withstand under the condition that the mechanical component of the manipulator is n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More