Modeling and control method for specialized robot for picking and placing projectiles
A projectile pick-and-place, control method technology, applied in instruments, manipulators, manufacturing tools, etc., can solve problems such as inability to apply robots, and achieve the effect of accurate and reliable control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The modeling of the present invention and control method are described in detail below in conjunction with accompanying drawing:
[0048] Projectile pick and place special robot modeling
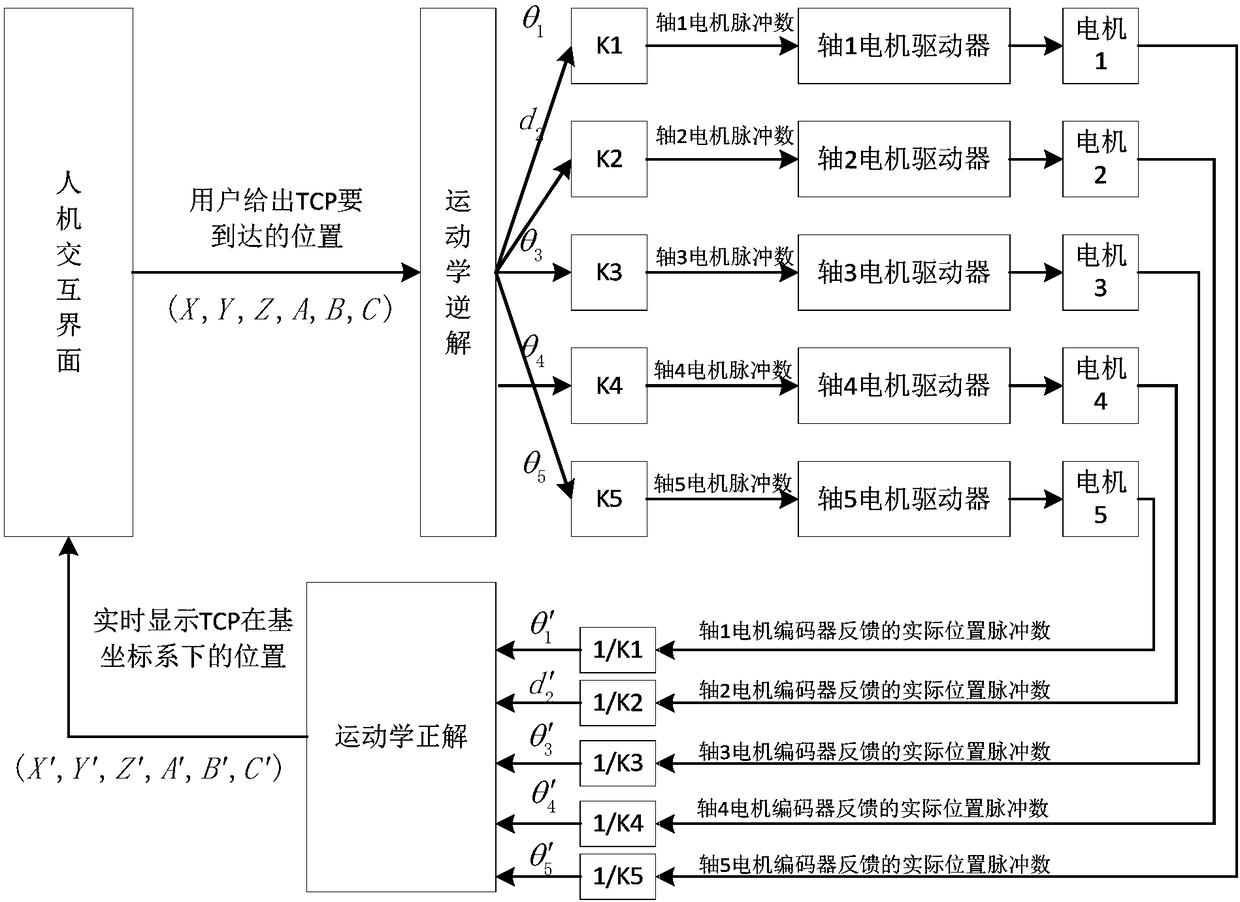
[0049] The modeling process is the process of obtaining the kinematics positive solution formula and kinematics inverse solution formula according to the D-H parameters and coordinate transformation by establishing the coordinate system of each motion axis; specifically:
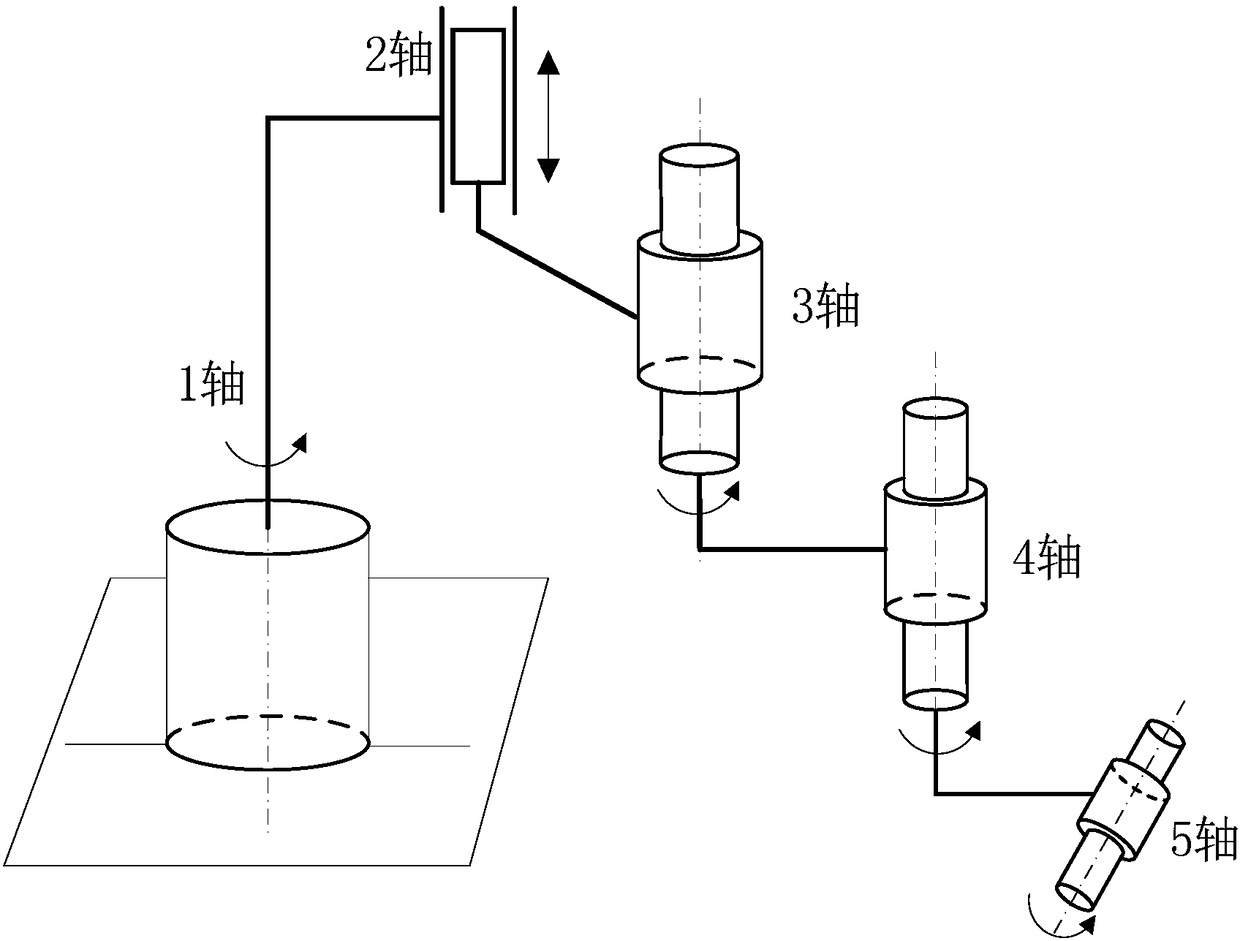
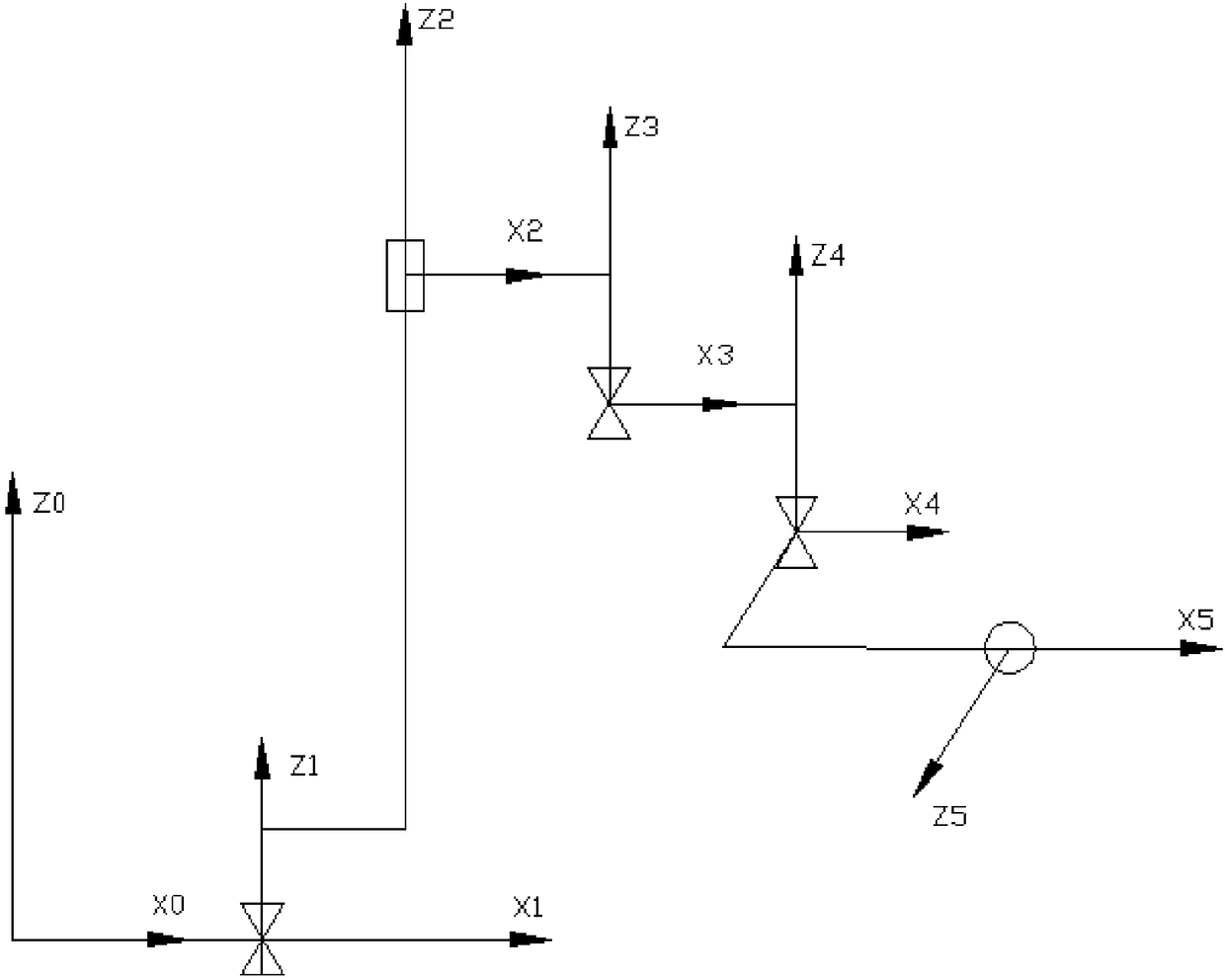
[0050] Step 1) Coordinate system determination
[0051] The projectile picking and placing special robot has 5 motion axes in total, and the coordinate system of each motion axis is defined as OX i Y i Z i : i=1~5, i represents the current motion axis; among them, Z i Axis is the direction of the i-th motion axis; X i Axis is along Z i-1 Axis and Z i Co-normal direction of axes; Y i The axes are determined by the right-hand rule;
[0052] Redefine the base coordinate system as OX 0 Y 0 Z 0 : The origin o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More