Farmland environment perception method for unmanned agricultural machinery
A farmland environment, unmanned driving technology, applied in the field of environmental perception, can solve the problem that unmanned agricultural machinery cannot perceive the farmland environment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
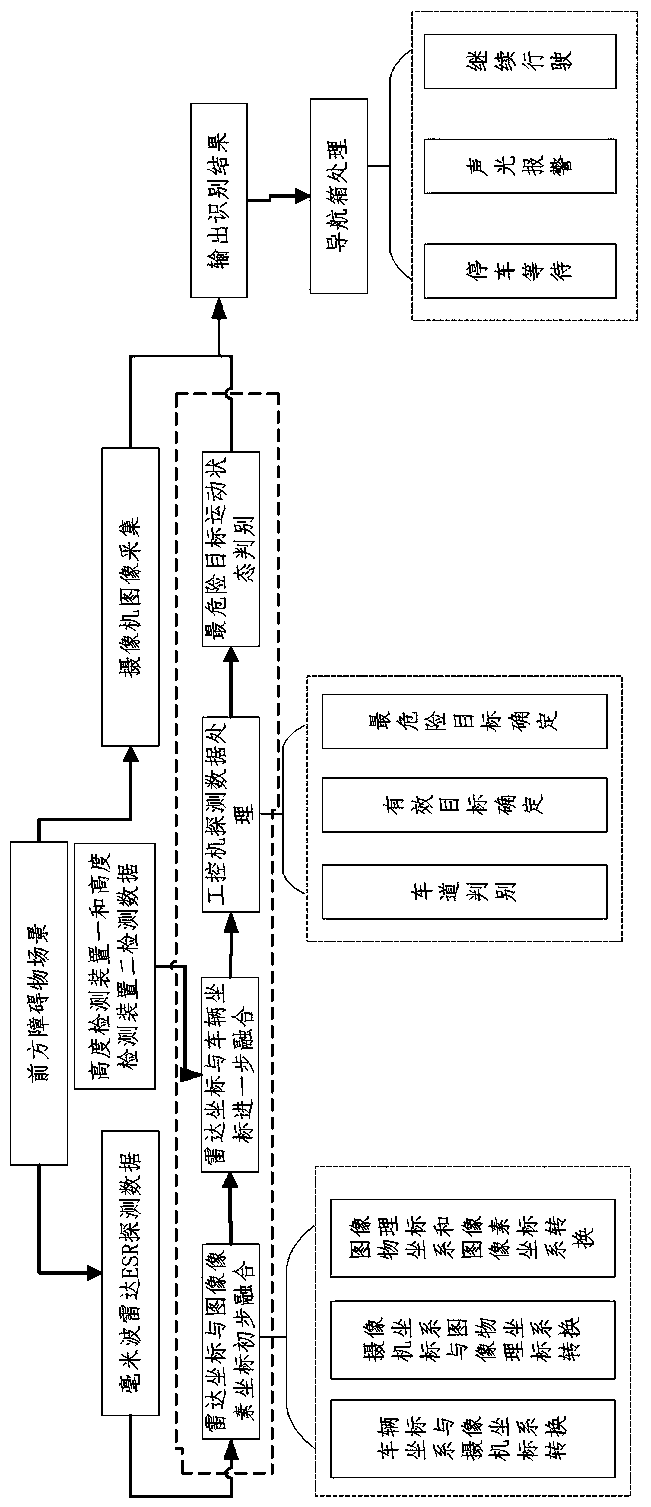
[0097] Such as Figure 1-9 A farmland environment perception method for unmanned agricultural machinery shown specifically includes the following steps:
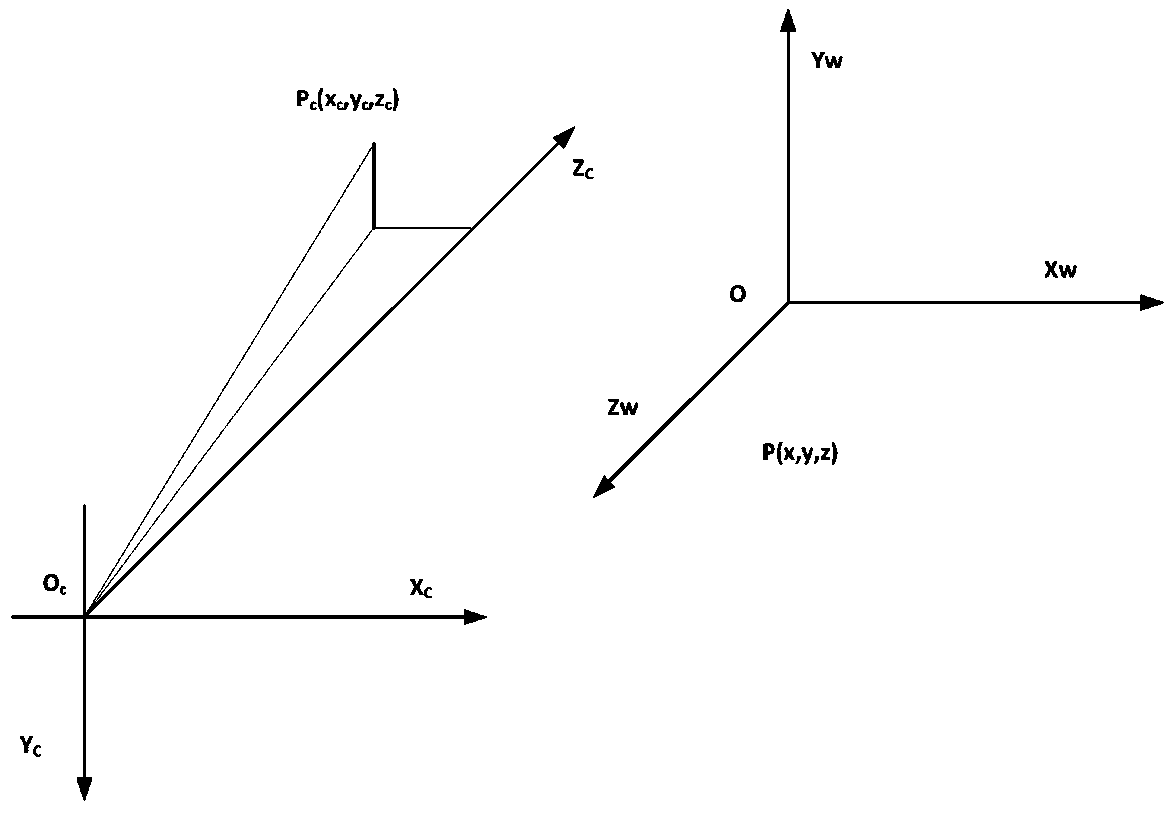
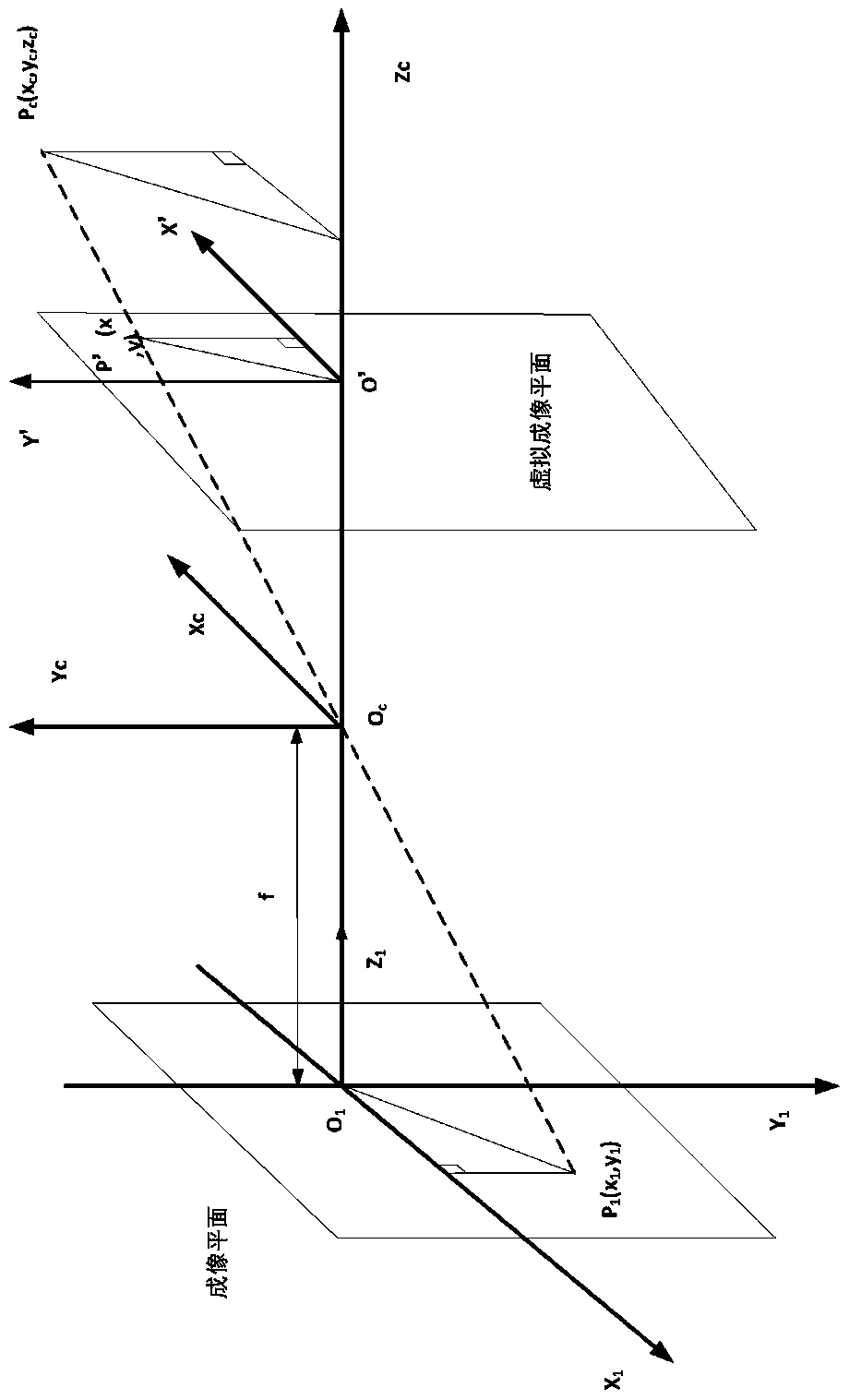
[0098] Step 1: Before the operation of agricultural machinery, the camera is calibrated, the camera space coordinates are transformed, and then the radar vision is calibrated jointly, so that the radar and visual information are fused in space;
[0099] Step 2: When the agricultural machinery is working, the distance detection device detects the height change △h between the radar and the ground in real time st , the distance detection device 2 detects the height change between the camera and the ground in real time △h ct , the industrial computer performs data processing to adjust the coordinate conversion relationship between the radar and the camera in real time, so that the radar and the camera can be synchronized in space under the working conditions;
[0100] Step 3: The industrial computer calculates the received mil...
Embodiment 2
[0168] The difference between this embodiment and embodiment 1 is that, as Figure 10 As shown, the housing 2 is in the shape of a cuboid.
Embodiment 3
[0170] The difference between this embodiment and embodiment 1 and embodiment 2 is that, as Figure 11 As shown, the distance sensor 8 is installed at the center of the top of the inner wall of the housing 2, and the distance sensor 8 is right against the center of the top of the slider 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com