Structure decoupling driven variable-stiffness soft hand
A variable stiffness, soft body technology, applied in the field of intelligent robots, can solve problems such as unfavorable control of soft hands, reduction of the scope of application of soft hands, etc., to achieve the effect of no mechanical fatigue and wear problems, risk reduction, and reasonable structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The technical solutions of the present invention will be described below in conjunction with the drawings and embodiments.
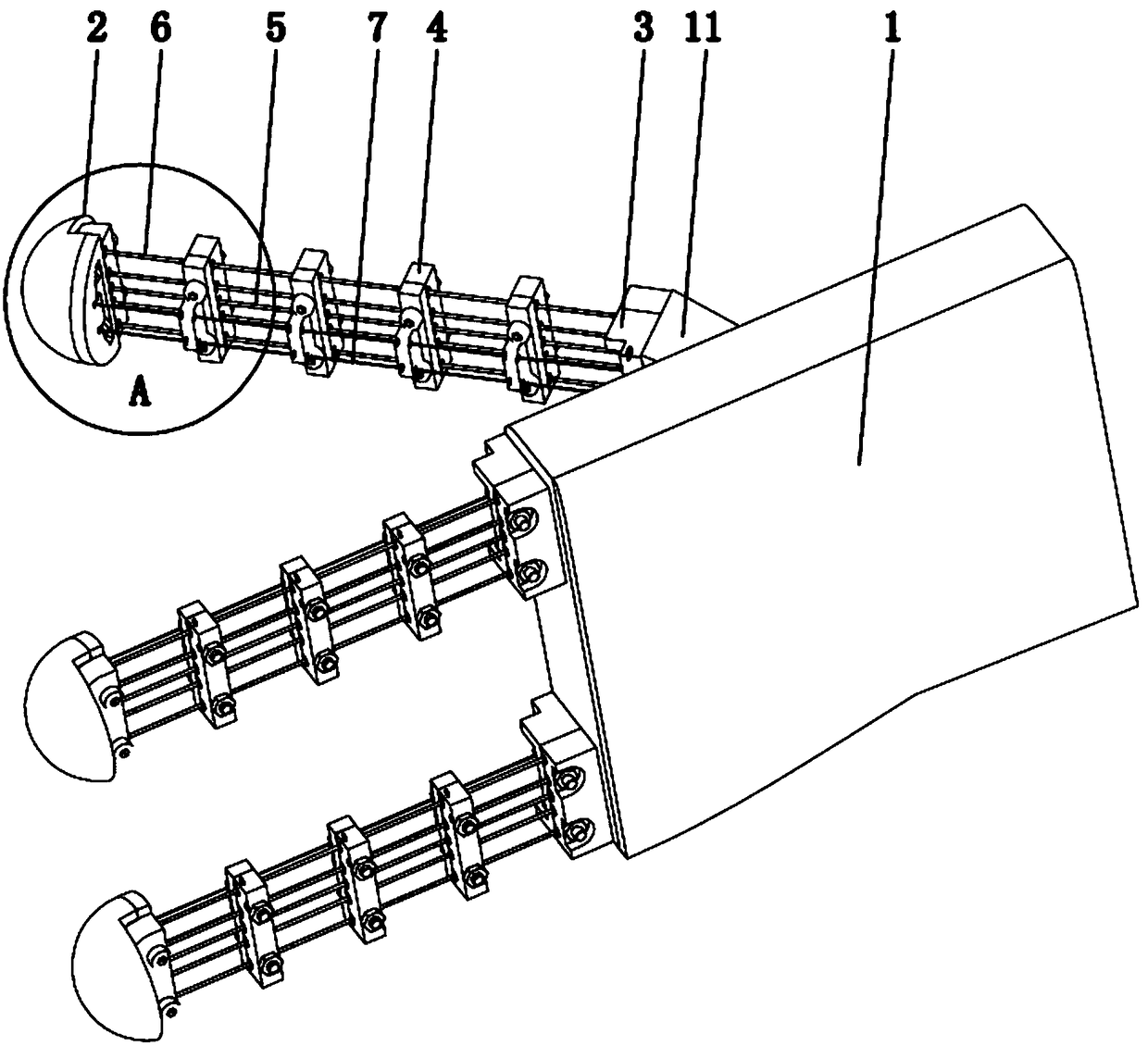
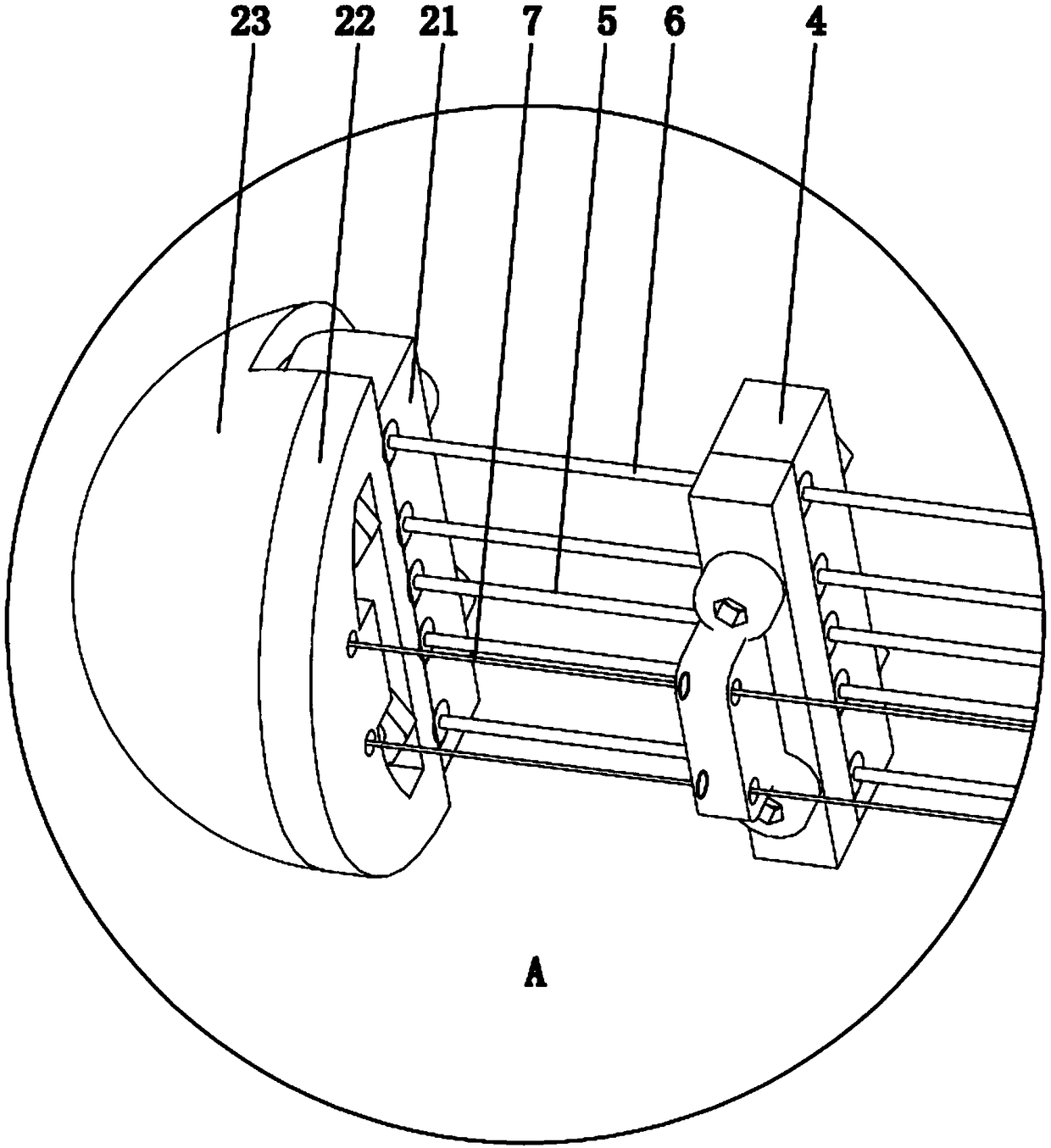
[0017] Such as figure 1 As shown, a decoupling-driven variable stiffness soft hand according to the present invention includes a palm base 1, and three electrical interfaces 11 at the front end of the palm base 1 are respectively equipped with three fingers with one long and two short fingers. , the finger includes fingertips 2, several knuckles 4 and finger bases 3 arranged at intervals in turn, and a skeleton structure is connected between the fingertips 2, several knuckles 4 and finger bases 3; Muscle structure and muscle tissue, the ends of the skeleton structure, muscle-like structure and muscle tissue are respectively connected to the electrical interface 11 through the finger root 3, the skeleton structure, muscle-like structure and muscle tissue are all SMA alloy materials; the three fingers are respectively installed The grasping structu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More