

Given time-based quadrotor unmanned aerial vehicle high-precision attitude tracking control method
A quadrotor UAV, a given time technology, applied in attitude control, vehicle position/route/altitude control, non-electric variable control, etc. problems, such as high-precision and fast attitude tracking control methods for quadrotor UAVs, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
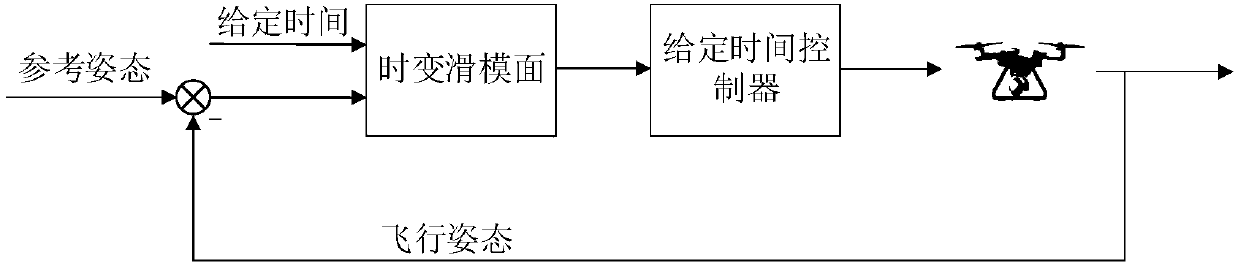
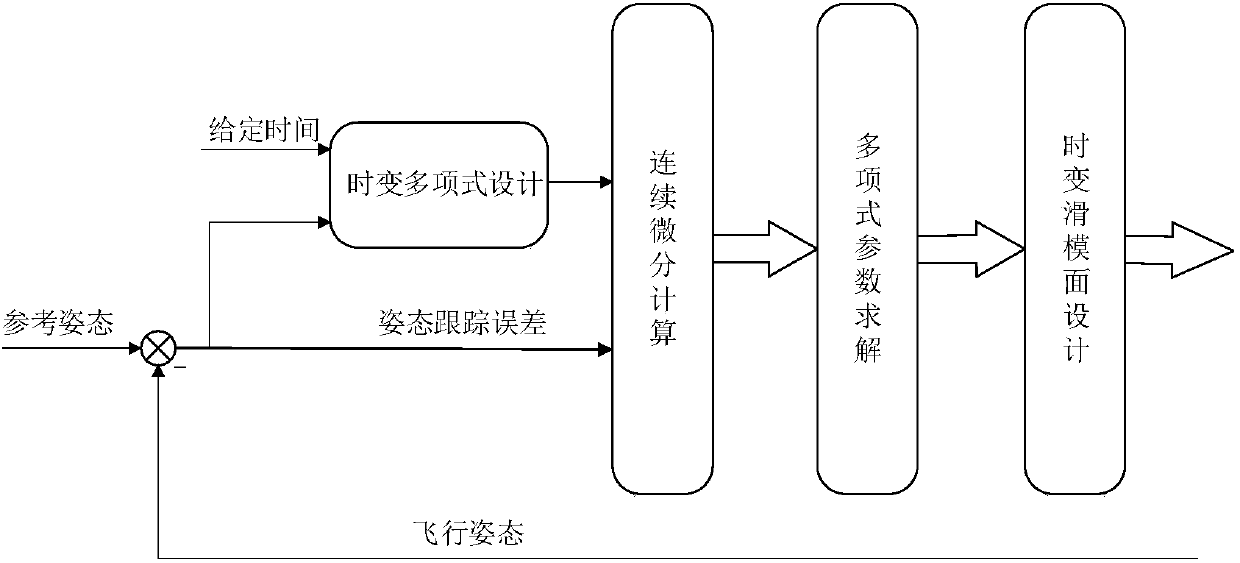
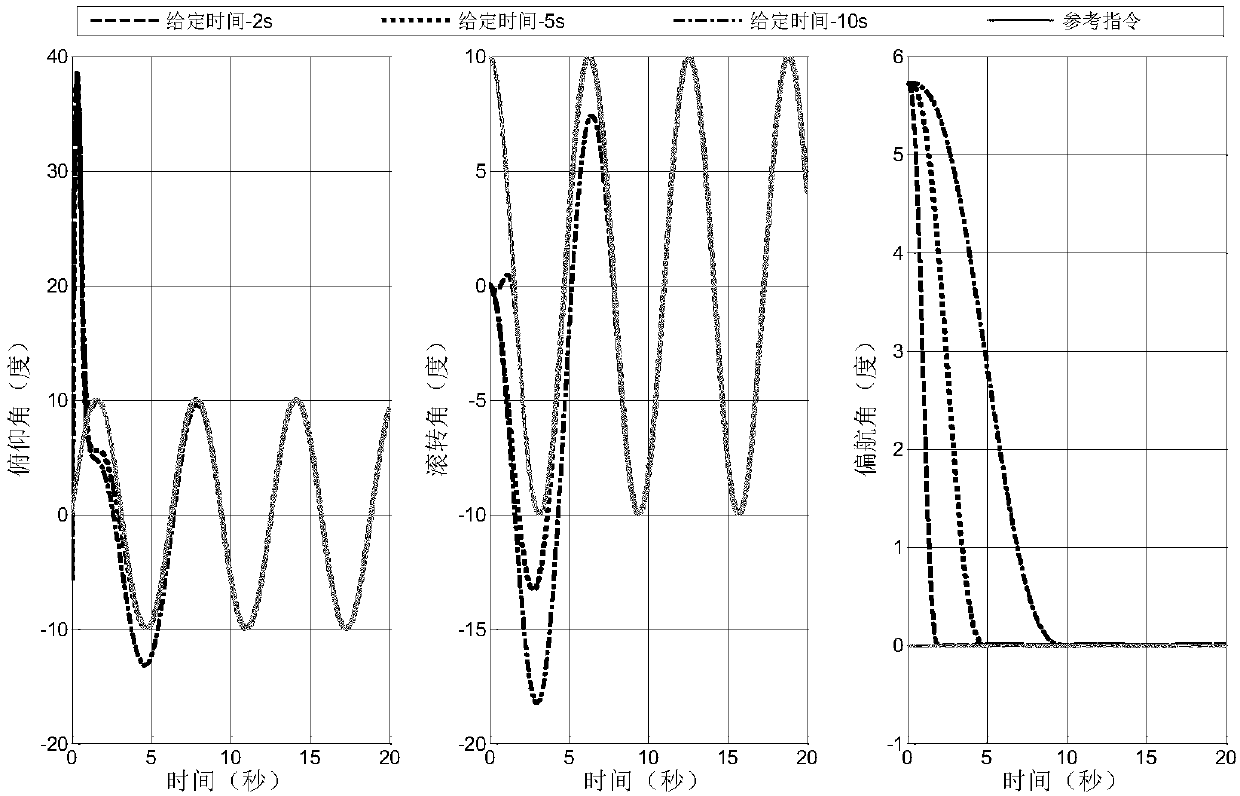
[0053] In view of the shortcomings of the existing control methods and the actual demand for fast maneuvering of the quadrotor UAV, the present invention comprehensively utilizes the time-varying control theory and the sliding mode control theory within the nonlinear control framework, and proposes a four-rotor control algorithm based on a given time convergence for the first time. High-precision and fast attitude tracking control method for rotor UAV. By designing a time-varying sliding mode surface related to a given convergence time, this method ensures that the initial state of the quadrotor UAV is located on the sliding mode surface, which ensures the global robustness of the system and can effectively improve the anti-interference ability of the system. On this basis, in order to obtain continuous attitude control signals, the system is augmented, and the controller is designed based on the time-varying sliding mode theory, and finally high-precision fast tracking of a gi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More