

UAV operator positioning system and method based on aerial radio monitoring platform
A technology for radio monitoring and aircraft operators, applied in radio wave direction/deviation determination systems, direction finders using radio waves, etc., can solve problems affecting positioning accuracy, poor emergency maneuverability, large volume, etc., to achieve the elimination of positioning The influence of accuracy, overcoming the dependence of the environment, and the effect of high-precision spatial positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The specific embodiments of the present invention will be described in detail below in conjunction with the technical solutions and accompanying drawings.
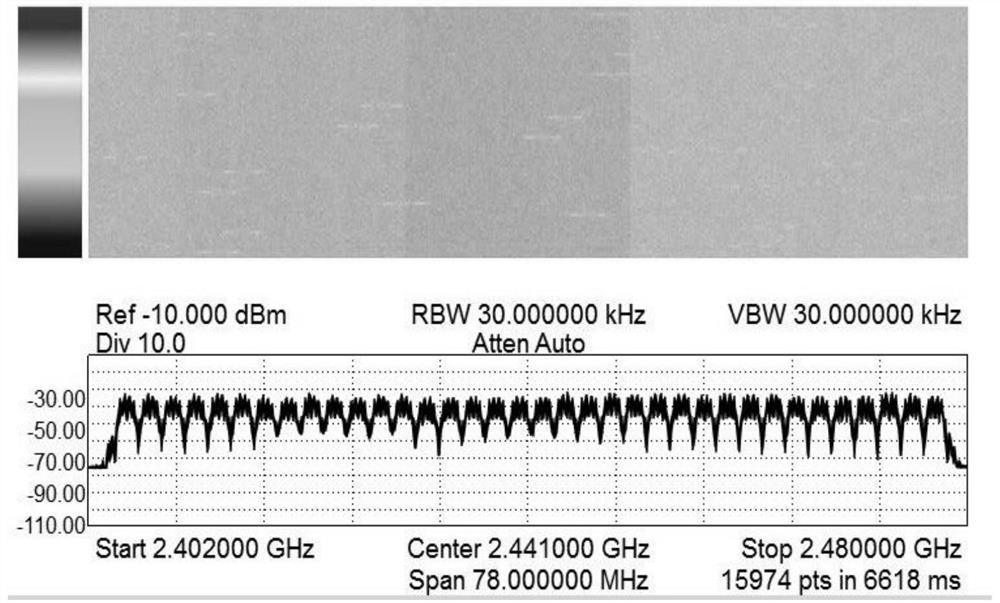
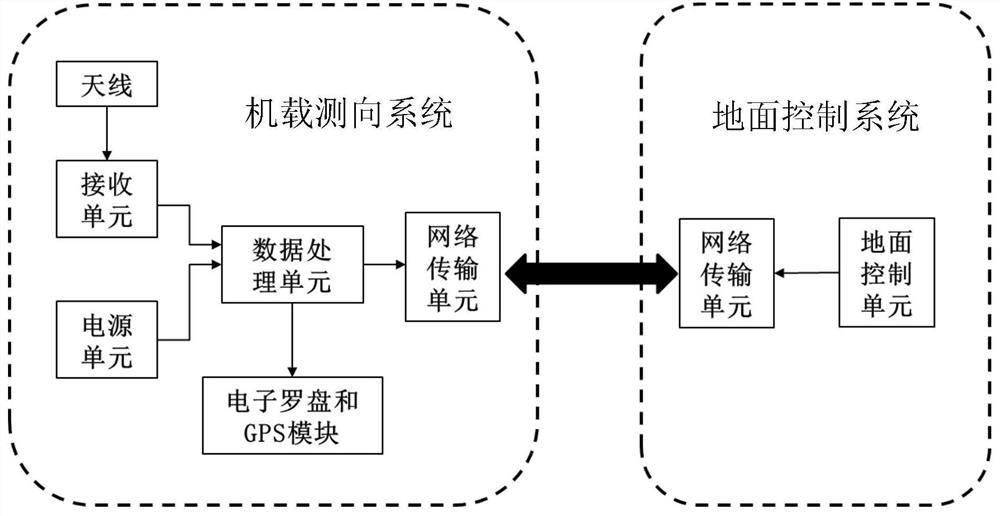
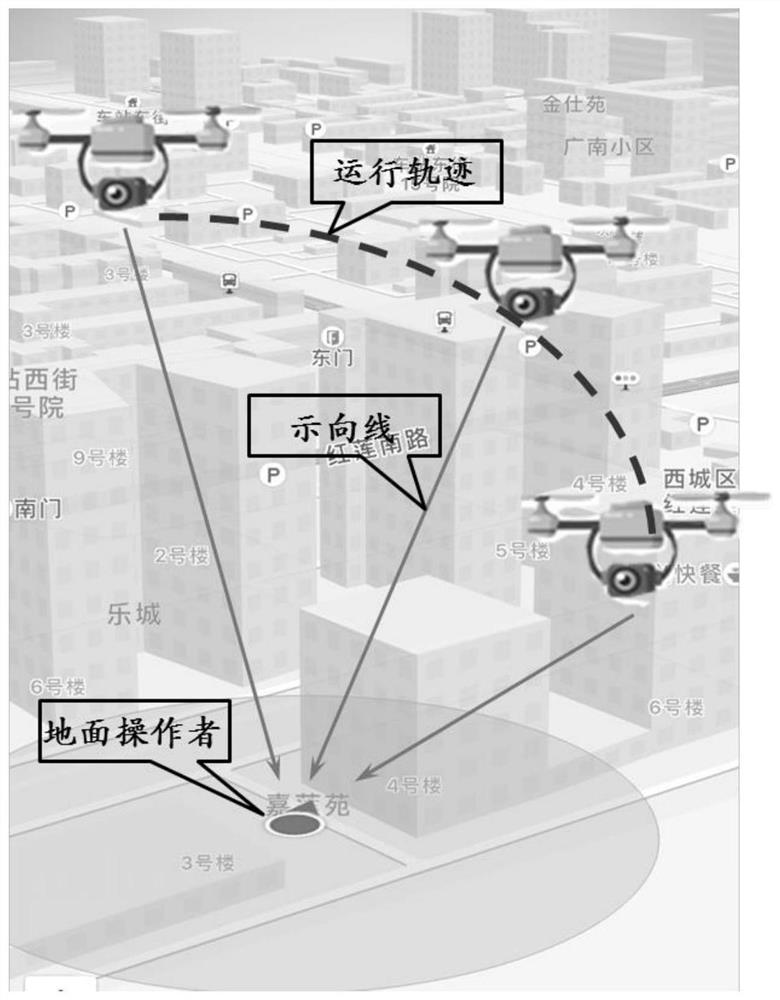
[0038] The UAV ground operator positioning system based on the aerial radio monitoring platform proposed by the present invention is used to solve the practical problem of operator positioning under the new situation of UAV control, and is a brand-new monitoring and positioning means. The invention can play an important and positive role in improving the control capability of the drone, maintaining people's property safety and social stability. The core technology of the invention is to realize rapid discovery and precise positioning of frequency hopping signals under complex background noise. The system has simple structure, high integration, small size, light weight, and strong mobility. It can respond quickly to emergencies and greatly reduce construction costs, which has great practical significance.
[0039] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More