

Vehicle-mounted barrier detection method based on radar data and image data fusion and deep learning
A technology of obstacle detection and deep learning, which is applied in the directions of measuring devices, electromagnetic wave reradiation, character and pattern recognition, etc., can solve the problem that it is difficult to adapt to high-speed motion and bump imaging requirements, optical camera imaging does not have distance information, and data information is low Confidence and other issues, to achieve the effect of accelerating network parameter adjustment towards better results, improving vehicle endurance, and accelerating hardware power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
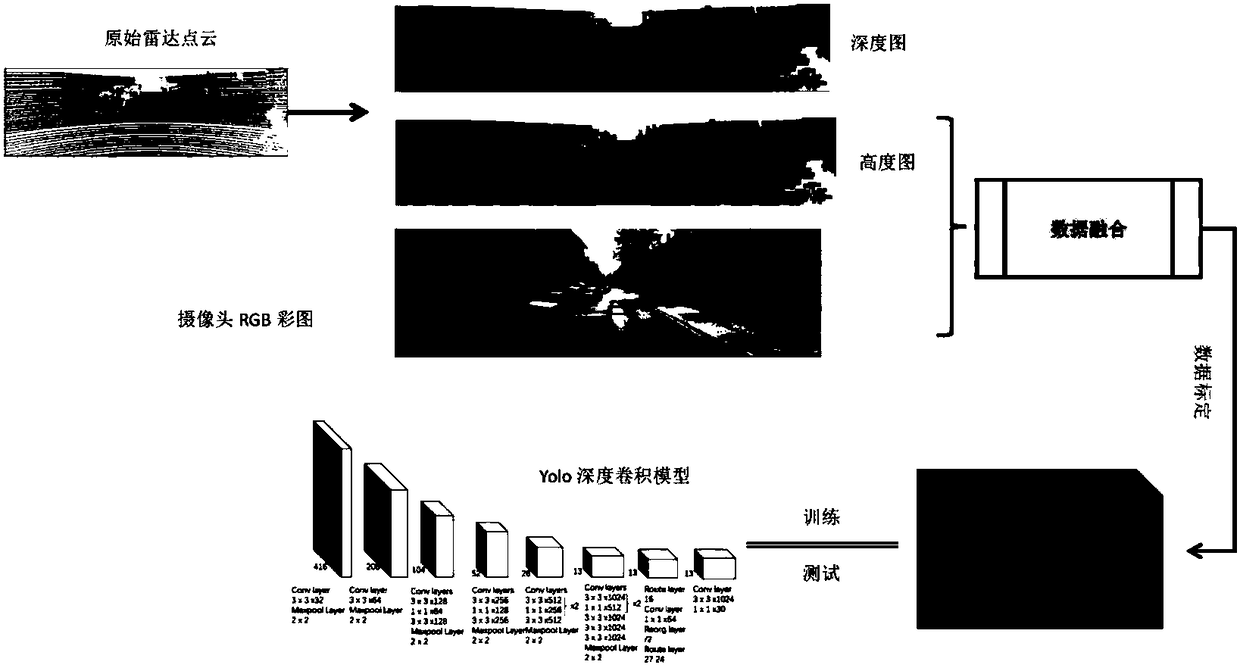
[0034] The present invention is a deep learning vehicle-mounted obstacle detection method based on radar and image data fusion, which is mainly used for vehicle-mounted sensor data fusion and target perception detection in the field of automatic driving, and the corresponding depth is obtained by preprocessing the calibrated radar data The image and height map data are fused with the RGB color image captured by the camera to train the Yolo convolutional network model. In real-time detection, the fusion data of radar and camera is directly input into the trained model, and the model gives the target position and related distance information in the picture.
[0035] The deep learning vehicle-mounted obstacle detection method based on radar and image data fusion of the present invention, the main steps are as follows image 3 As shown, the following wil...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More