

Robot SLAM (simultaneous localization and mapping) method based on semantic segmentation technique
A semantic segmentation and robot technology, applied in the field of robot navigation, can solve the problems of limited application, limited SLAM application range, high complexity of beam adjustment algorithm, and achieve the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] In order to make the above objects, features and advantages of the present invention more comprehensible, specific implementations of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be noted that all the drawings of the present invention are in simplified form and use inaccurate scales, and are only used to facilitate and clearly assist the purpose of illustrating the embodiments of the present invention.
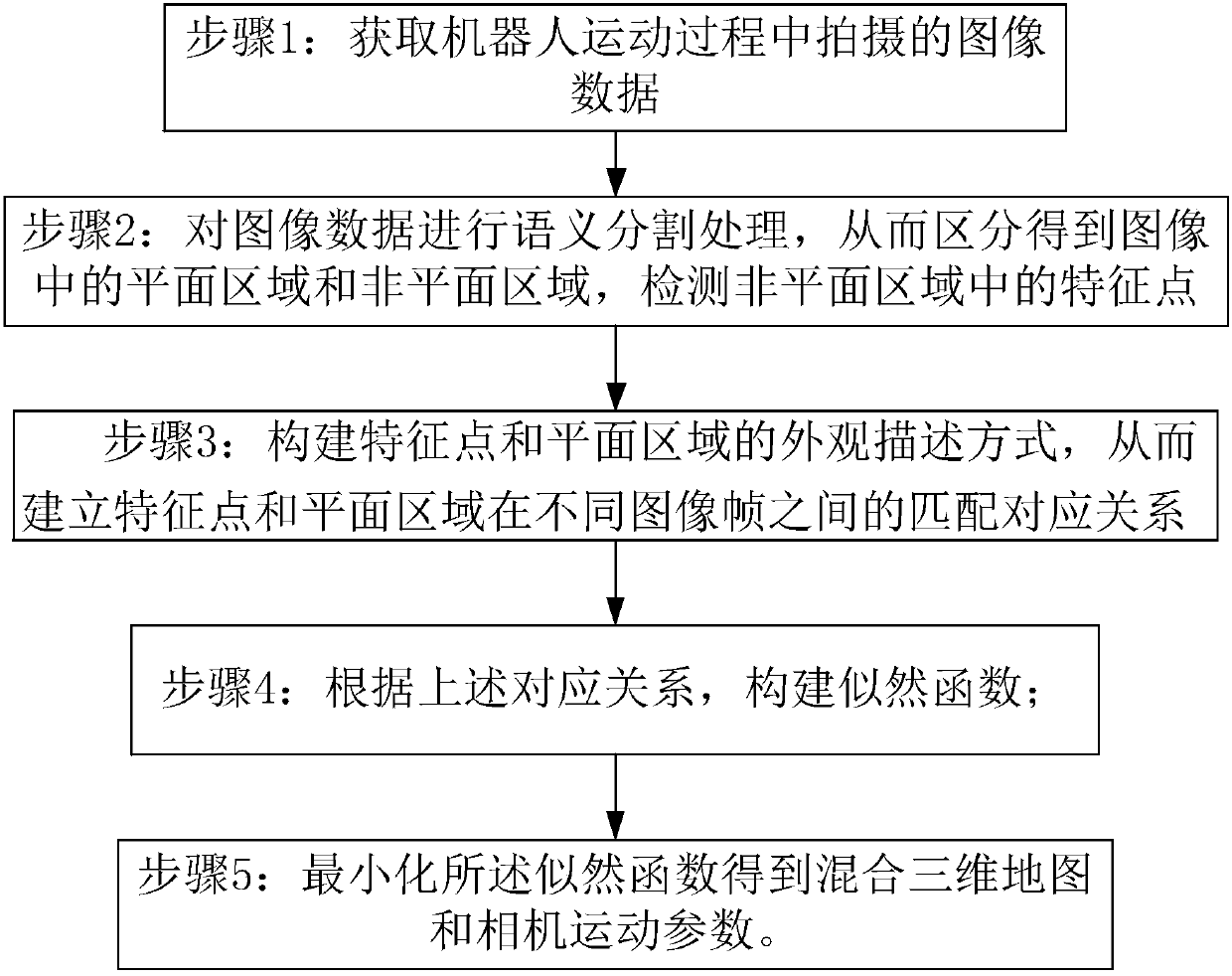
[0025] like figure 1 As shown, the present invention provides a robot SLAM method based on semantic segmentation technology, which obtains camera motion parameters and simultaneously constructs a mixed 3D map of the environment by processing video sequences captured by a monocular camera. It specifically includes the following:
[0026] Step 1: Obtain the image data captured during the movement of the robot, which is a video sequence captured by a monocular camera.
[0027] Step 2: Use SegNet (Semanti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More