

Multi-device visual navigation method and system under variable scene
A visual navigation, multi-device technology, applied in the field of robot navigation, can solve the problems of inability to correct markers, consume a lot of manpower, easy to wear, etc., to avoid recognition accuracy and reliability, save network bandwidth and resources, and ensure real-time updates. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062]The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
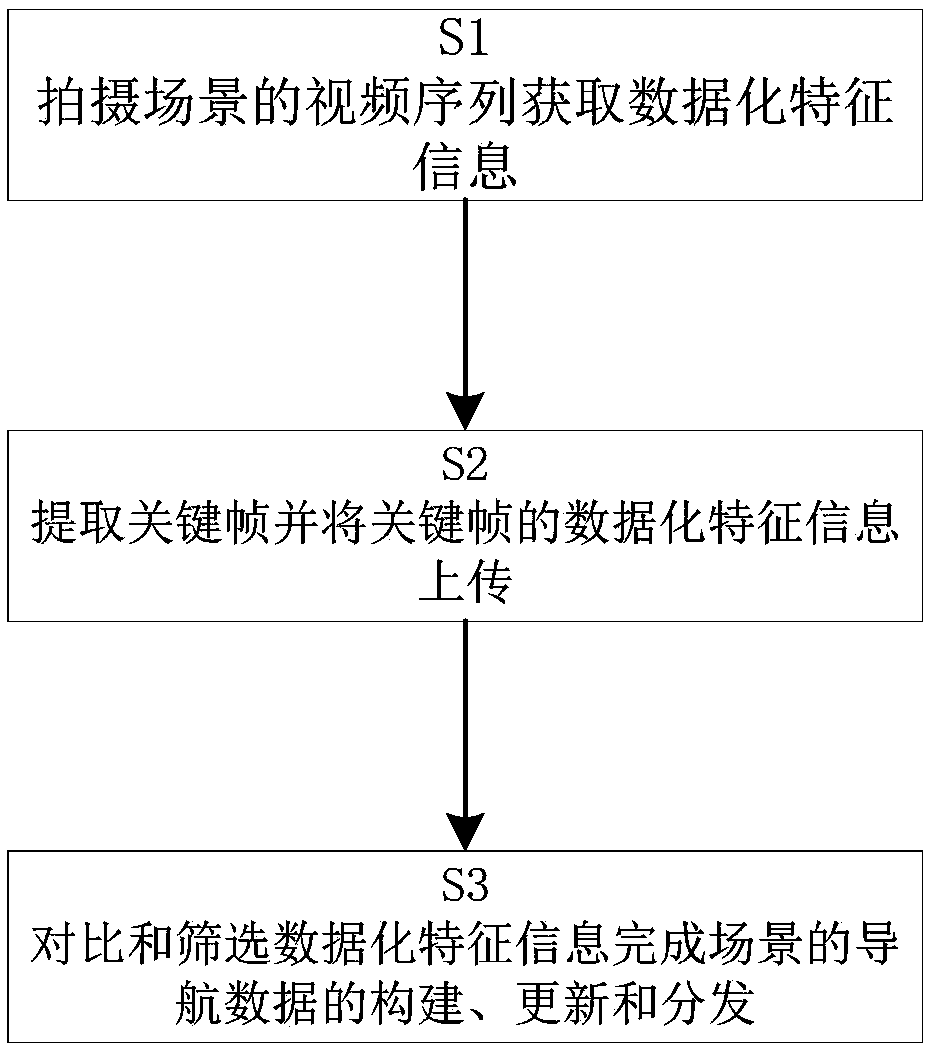
[0063] The present invention provides a multi-device video navigation method and system in variable scenarios, which are mainly applied in variable and complex scenarios such as warehouse automation. The warehouse automation environment mainly includes mobile shelves and automatic navigation robots. The bottom of the mobile shelf has a space for the automatic navigation robot to enter. The automatic navigation robot can enter the bottom of the mobi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More