

Automatic groove cutting system and cutting method based on three-dimensional vision and model matching
A technology of automatic cutting and model matching, applied in welding equipment, gas flame welding equipment, metal processing equipment, etc., can solve problems such as inability to automatically cut, and achieve the effect of improving automation and intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the purpose, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be described in detail below. Apparently, the described embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other implementations obtained by persons of ordinary skill in the art without making creative efforts fall within the protection scope of the present invention.
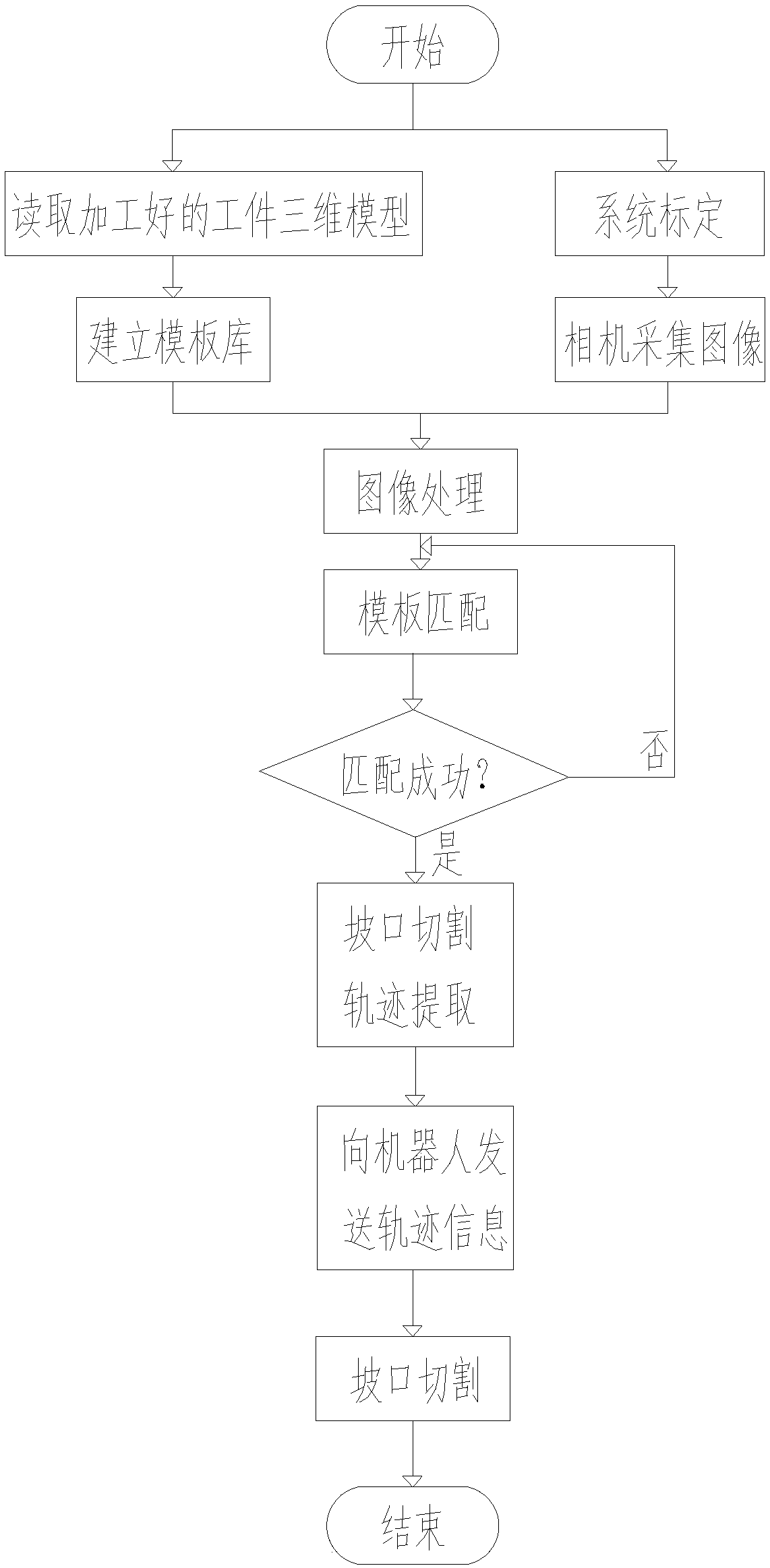
[0035] The invention provides an automatic groove cutting system based on three-dimensional vision and model matching, which integrates vision, optics and electromechanical equipment, including a 3D vision subsystem, a host computer, a motion control system, a cutting robot and cutting equipment, and a 3D vision subsystem. The system is connected with the signal of the host computer, the signal of the host computer is connected with the motion control system, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More