

Flying robot arm based on sliding mode PID (proportion integration differentiation) control
A technology of mechanical arm and sliding mode, which is applied in the aviation field and can solve problems such as poor robustness and poor anti-interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
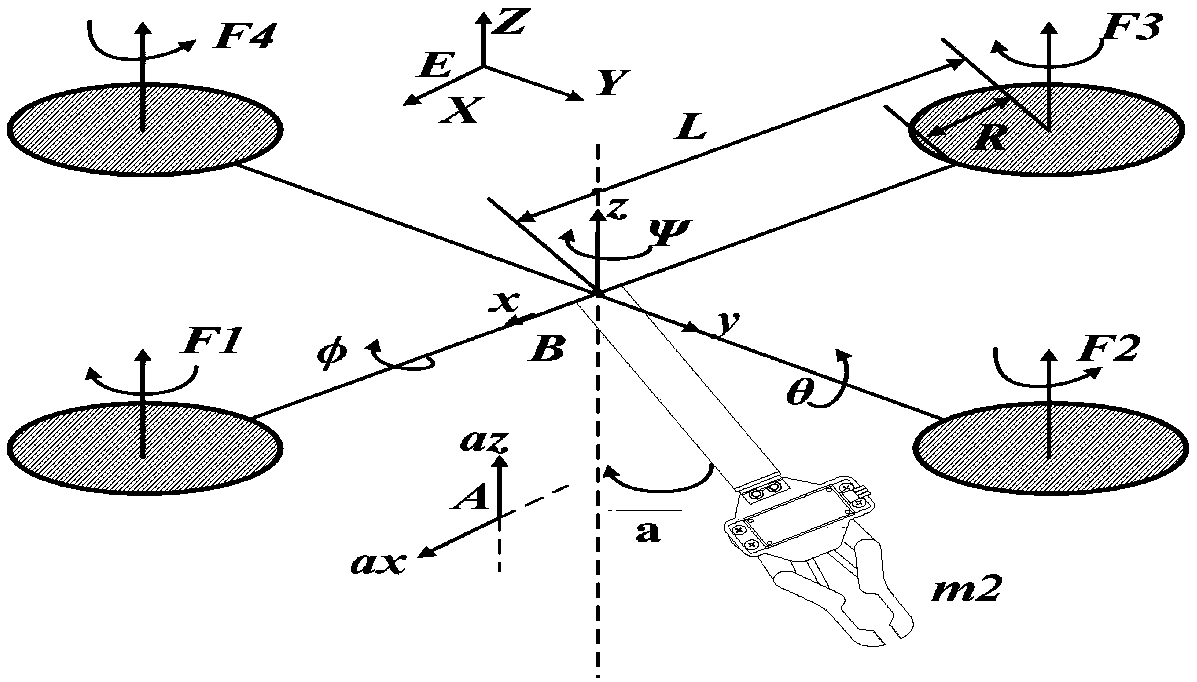
[0021] figure 1 It is a structural diagram of a quadrotor equipped with a robotic arm. For the convenience of modeling and analysis, three coordinate systems have been established—the earth coordinate system E-XYZ, the quadrotor coordinate system B-xyz, and the robotic arm coordinate system A-ax,az. Among them, the E coordinate system can be regarded as an inertial coordinate system, while the B coordinate system is a follow-up coordinate system and the origin of B is located at the centroid of the quadrotor, and the equipped robotic arm is located below the quadrotor.
[0022] Table 1 Four-rotor structure parameter list
[0023]
[0024] Select the generalized coordinate vector q=(φ,θ,ψ,x,y,z,a) T , pseudo velocity vector p=(p,q,r,u,v,w,b) T , based on the Euler-Poincaré equation to establish the dynamic model of the quadrotor UAV [...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More