Bus-based distributed movement control system and bus-based distributed movement control method
A motion control system and motion control technology, applied in the general control system, control/regulation system, program control, etc., can solve the cost and performance pressure of the controller 100, the reduction of the accuracy and performance of the controller 100, and the control error of the slave station 101 and other problems, to achieve the effect of increased and reduced calculation, low cost, and reduced control cycle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in more detail below in conjunction with the accompanying drawings and embodiments.
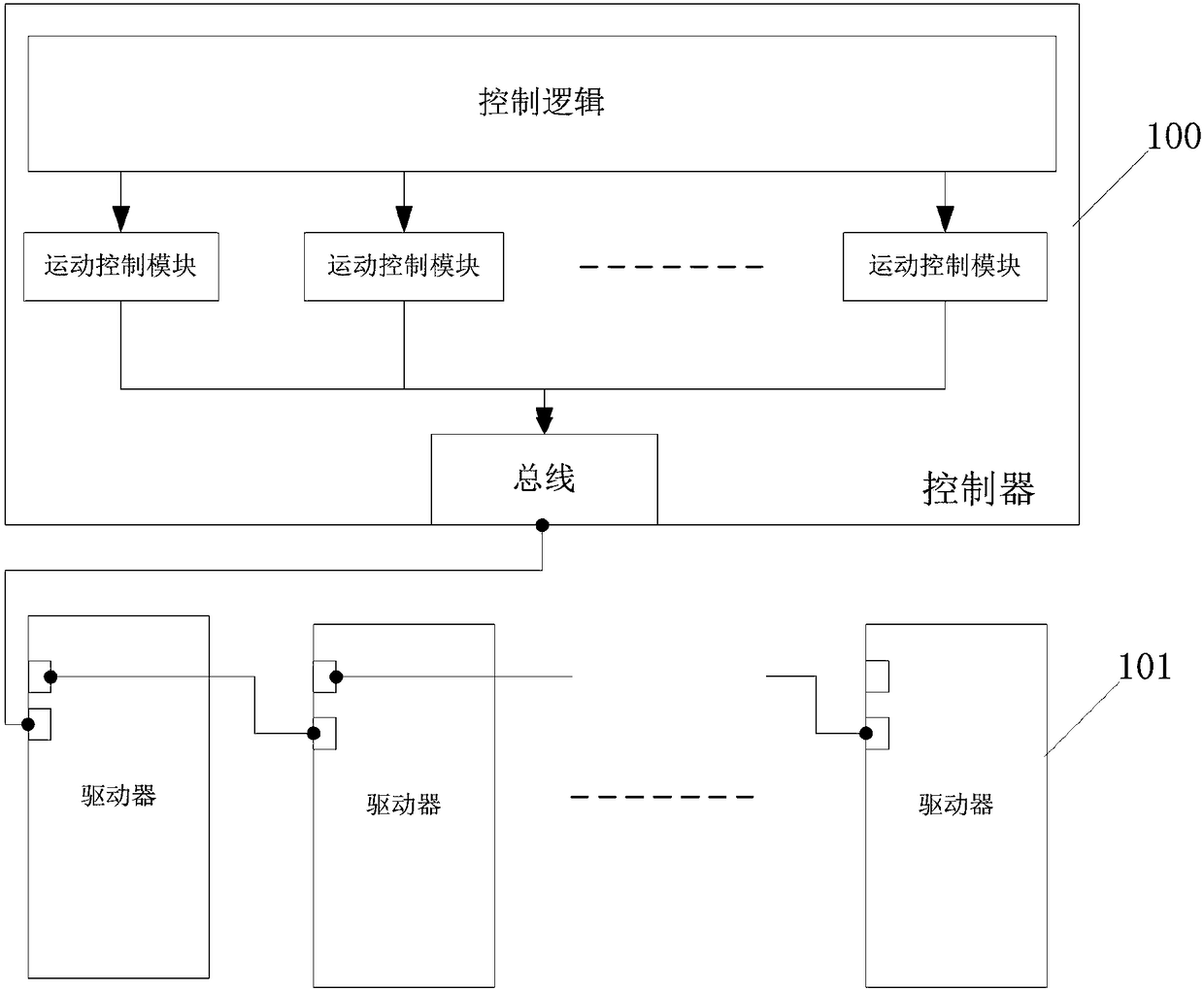
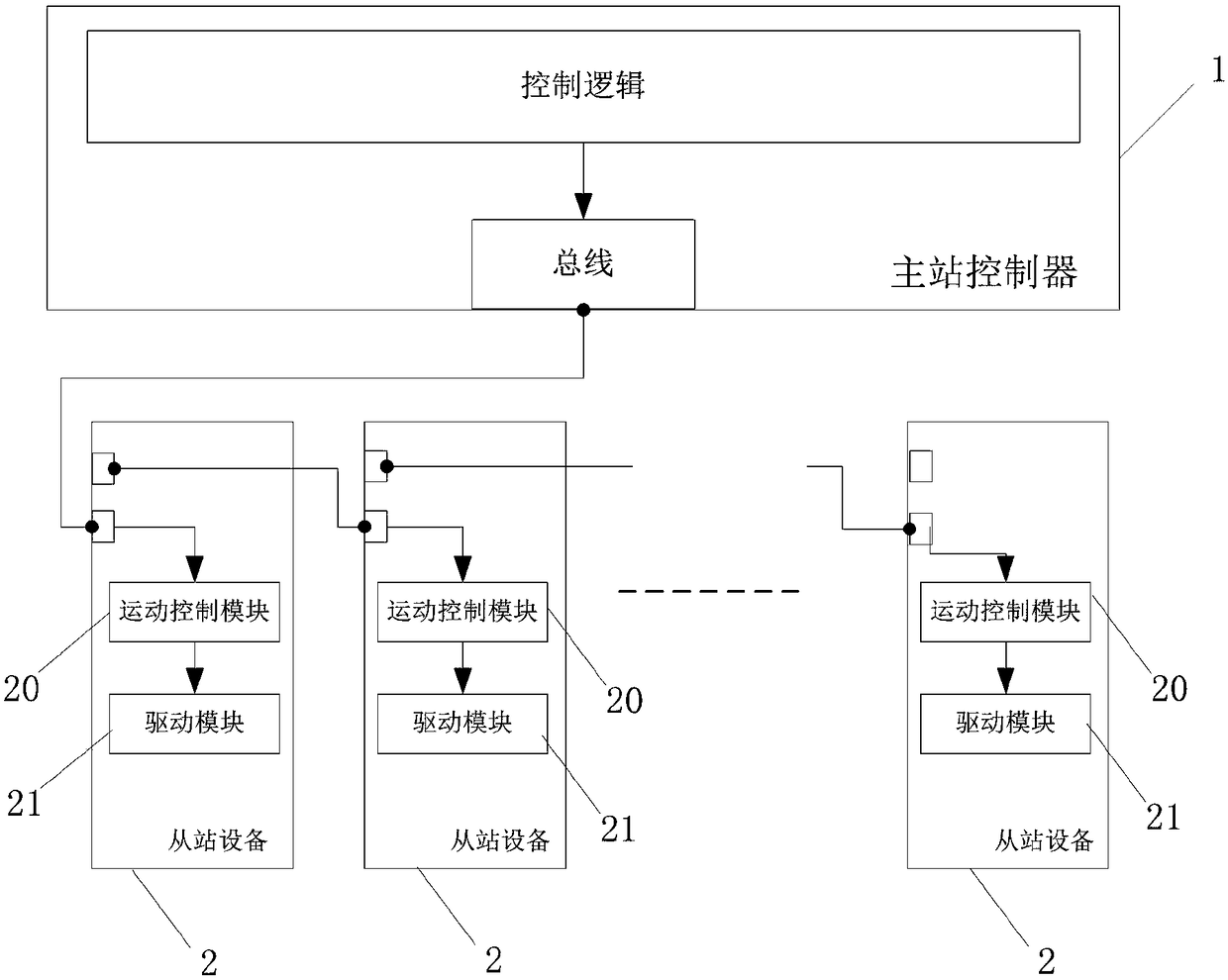
[0023] The invention discloses a bus-based distributed motion control system, please refer to figure 1 , which includes a master controller 1 and a plurality of slave devices 2, wherein:
[0024] The master station controller 1 is used to generate motion control parameters and send the motion control parameters;
[0025] The master controller 1 is connected to a plurality of slave devices 2 through a bus, the slave devices 2 are used to receive motion control parameters sent by the master controller 1, and the slave devices 2 are used to control The parameter calculates the real-time position data, speed data and / or torque data of the motor, and drives the motor to run.
[0026] In the above system, after the master station controller 1 generates the motion control parameters, it sends the motion control parameters to the specified slave statio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More