

Cooperative control system and method for UAV and unmanned ship based on cooperative cloud control
A collaborative control and control system technology, applied in the direction of control/regulation system, attitude control, non-electric variable control, etc., can solve the problems of not being able to obtain accurate information of surrounding obstacles, short battery life, etc., to reduce the burden of data processing, The effect of enhanced battery life, increased transmission speed and distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
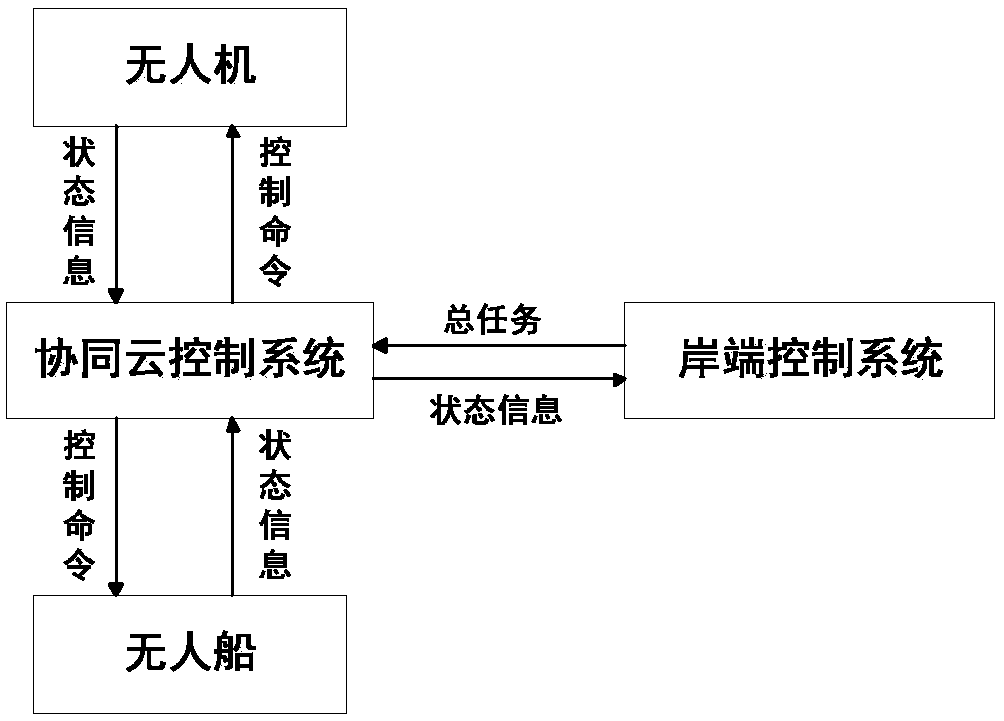
[0048] exist figure 1 Among them, the UAV and unmanned ship cooperative control system and method based on collaborative cloud control, including UAV, unmanned ship, cooperative cloud control system and shore control system, unmanned ship, UAV and cooperative cloud control The system and the collaborative cloud control system communicate with the shore control system through the 4G network;
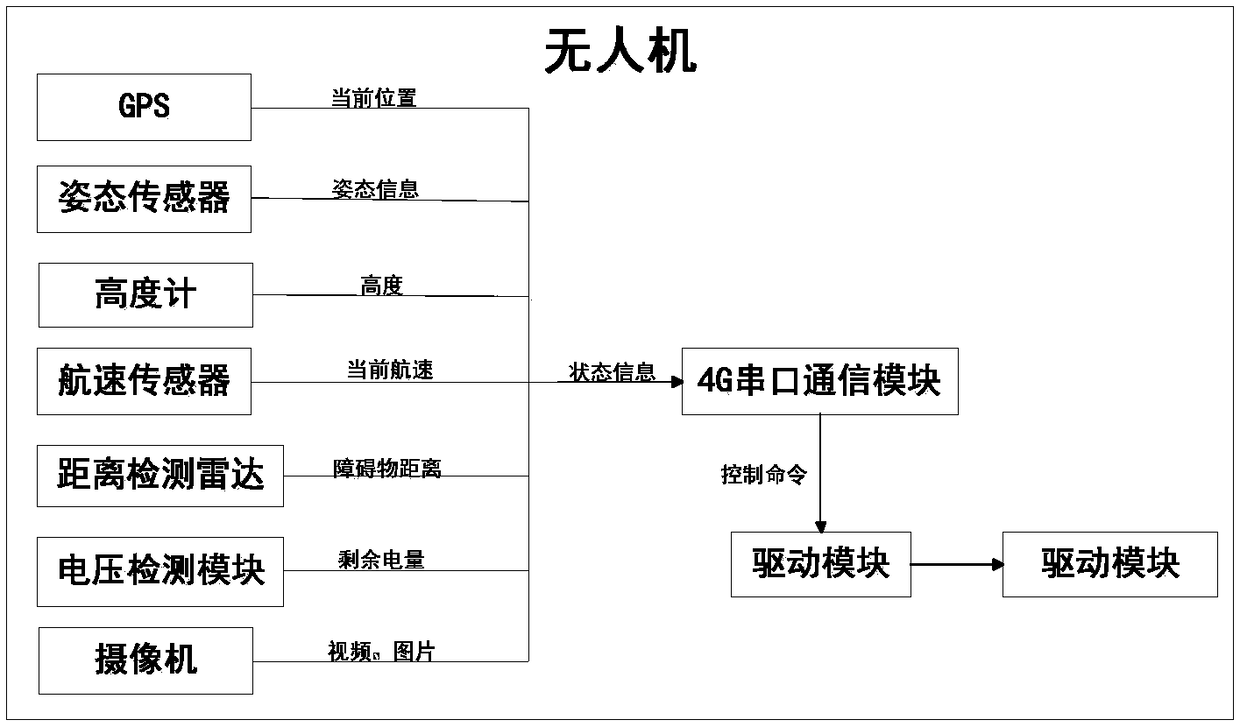
[0049] Specifically, in figure 2 The UAV is used to cooperate with the unmanned ship to complete the specified work, including the communication module, processor, drive module, actuator, GPS, attitude sensor, altimeter, speed sensor, distance detection radar, voltage detection module, PTZ, camera;
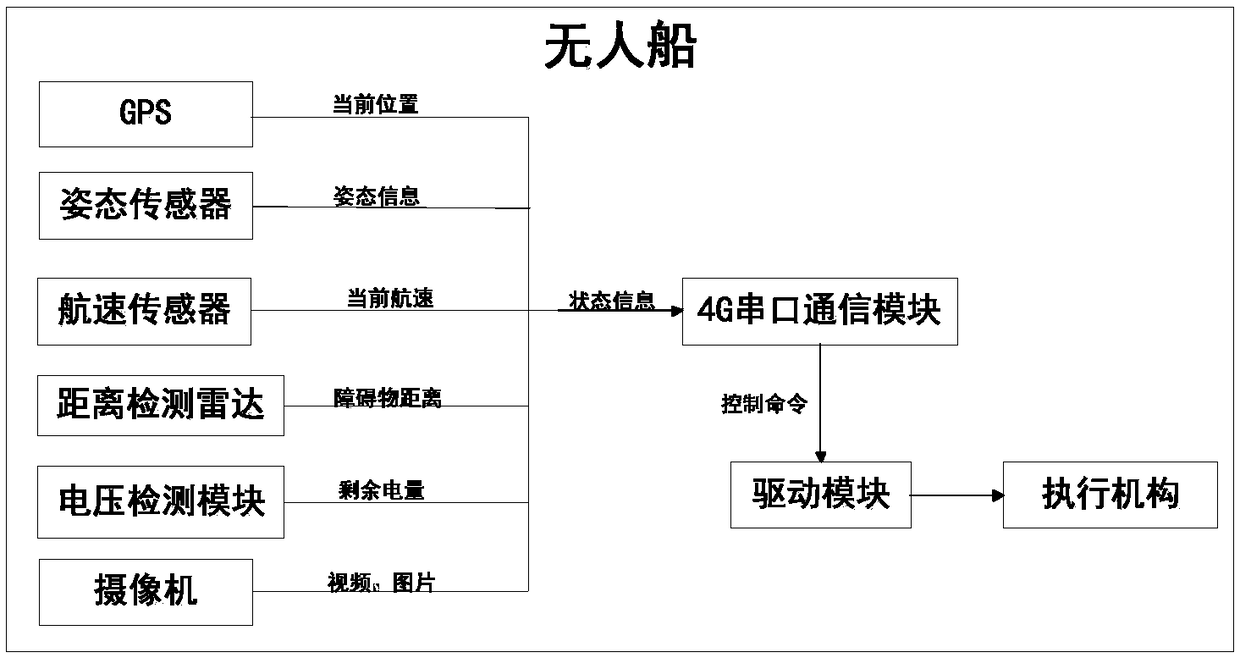
[0050] Specifically, in image 3 The unmanned ship executes the control command of the collaborative cloud control system, complet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More