Multi-joint robot arm
A multi-joint robot and joint technology, applied in the field of robotics, can solve problems such as difficult arm structure and complex design of connecting parts, and achieve the effects of compact joint structure, saving installation space, and easy connection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
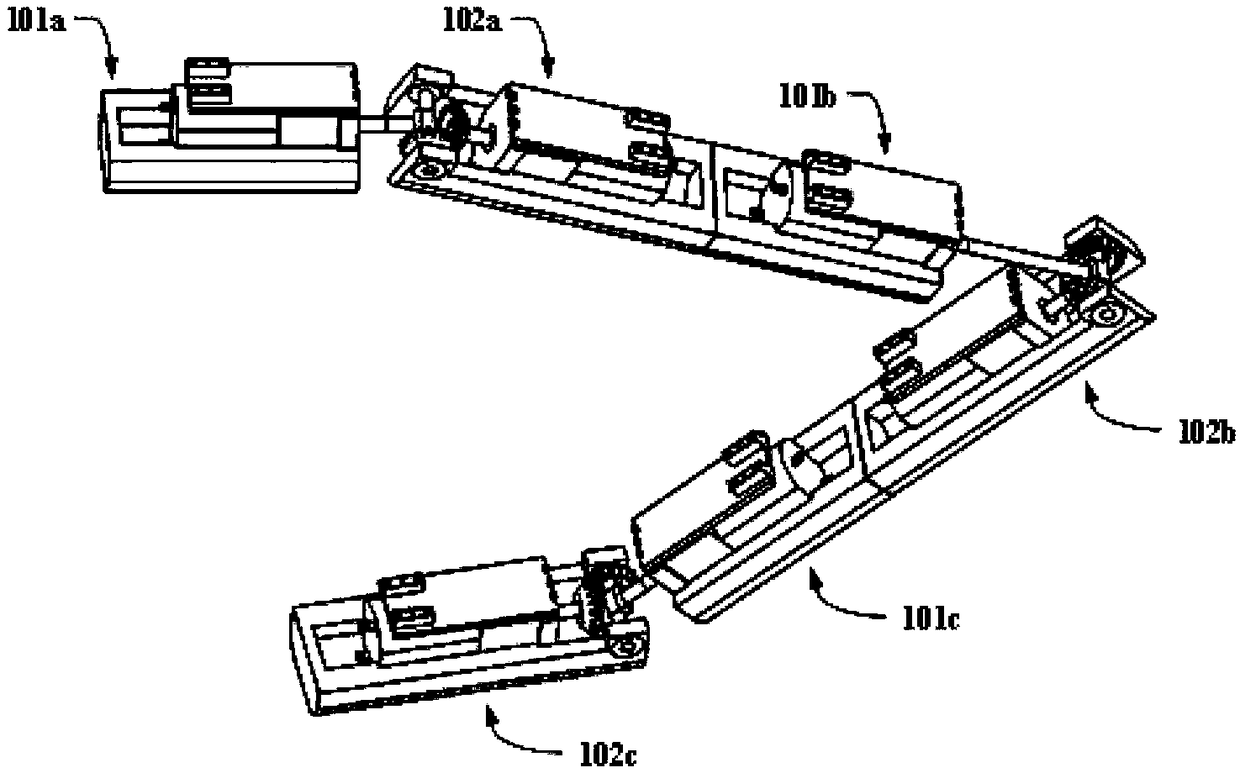
[0022] Combine below Figure 1-3 Describe this embodiment, the present invention relates to the technical field of robots, more specifically a multi-joint robot arm, including a shoulder rotary joint 101a, a big arm swing joint 102a, a big arm rotary joint 101b, a forearm swing joint 102b, a small The arm rotation joint 101c and the wrist swing joint 102c provide a modular mechanical joint and a robot arm using it, which can simplify the design of the robot arm and effectively save installation space.
[0023] The shoulder swivel joint 101a is welded to the upper arm swing joint 102a, the upper arm swing joint 102a and the upper arm swivel joint 101b are connected by bolts, the upper arm swivel joint 101b is welded to the forearm swing joint 102b, and the forearm The swing joint 102b is connected to the forearm swivel joint 101c by bolts, and the forearm swivel joint 101c is welded to the wrist swing joint 102c.
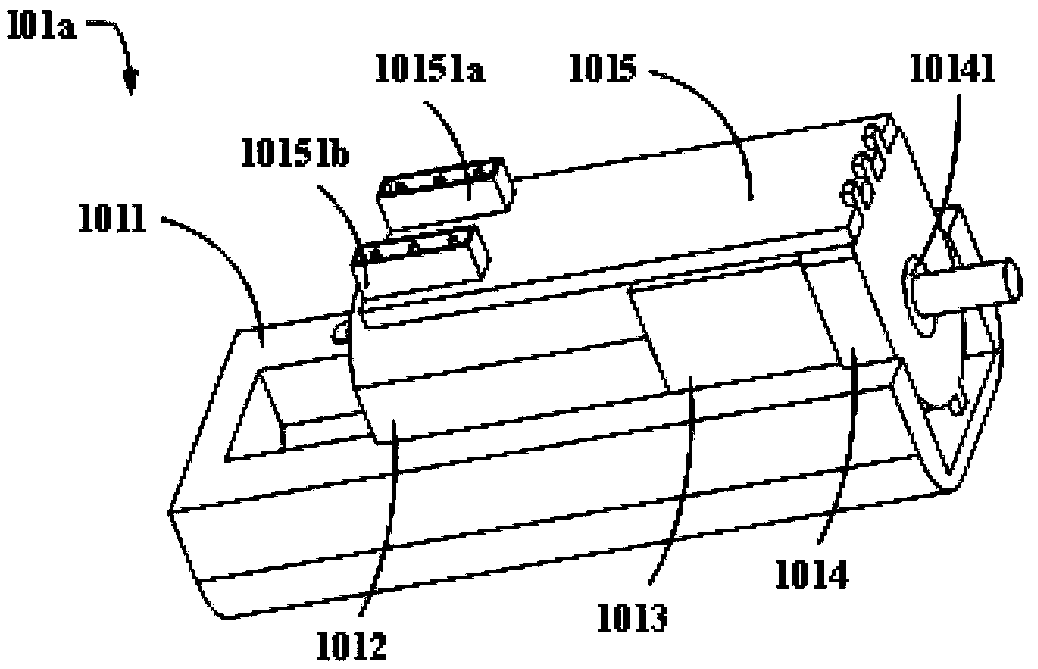
[0024] The structure of the shoulder revolving joint 101a, arm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More