

Flexible robot for narrow space detection
A space detection and robot technology, applied in the field of flexible robots, can solve the problems of poor fluid drive control accuracy, high working density, and low actuation frequency, and achieve fast pneumatic elongation, efficient elongation and contraction, and easy storage Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below with reference to the accompanying drawings and in combination with preferred embodiments.
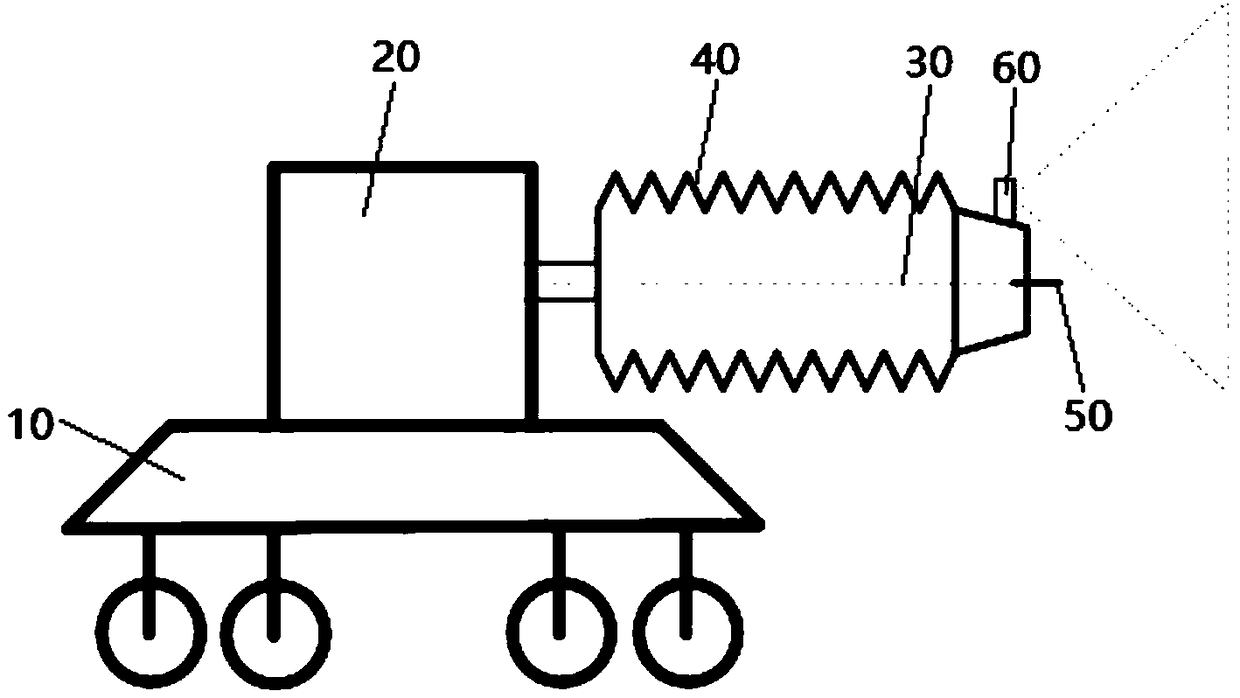
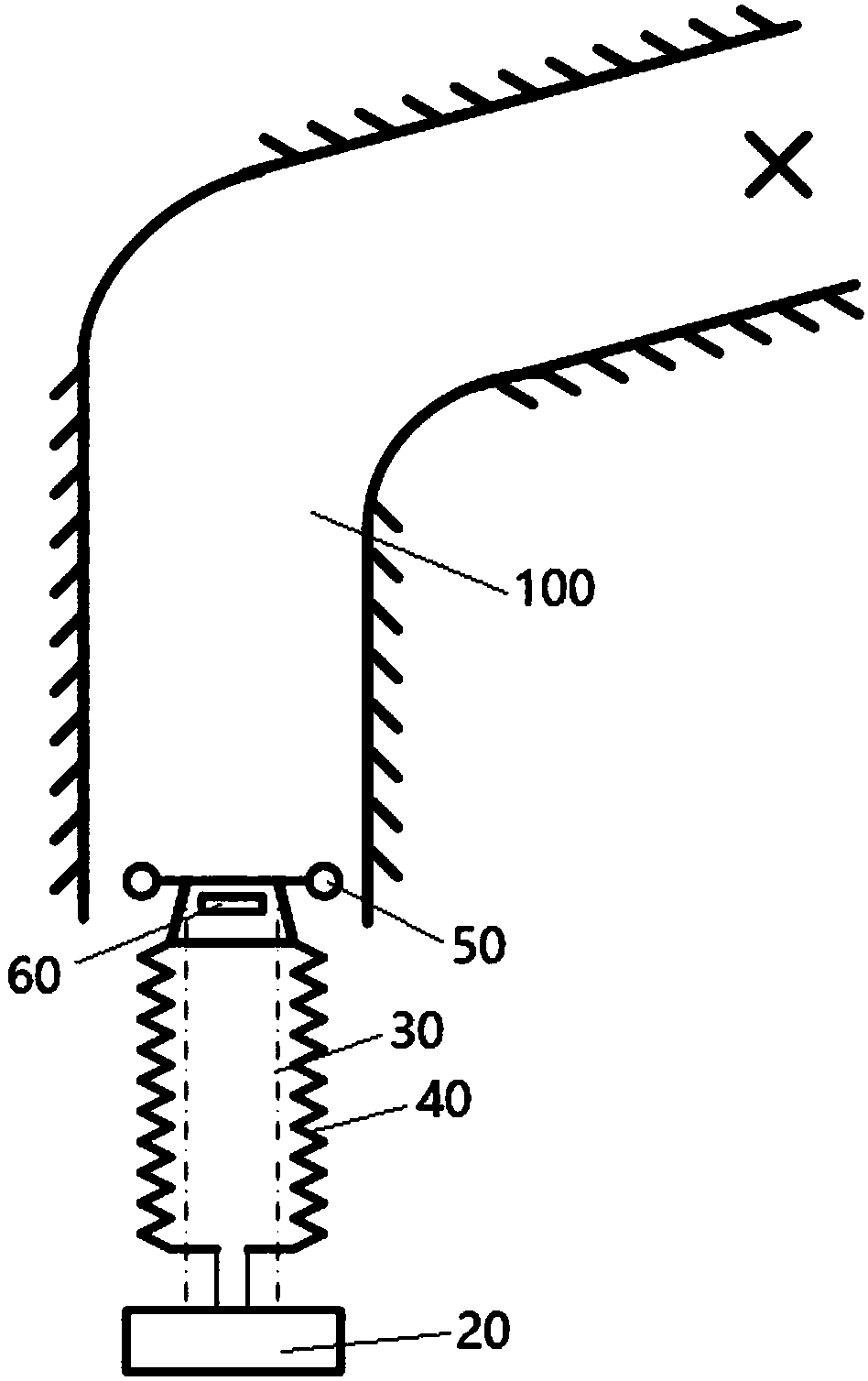
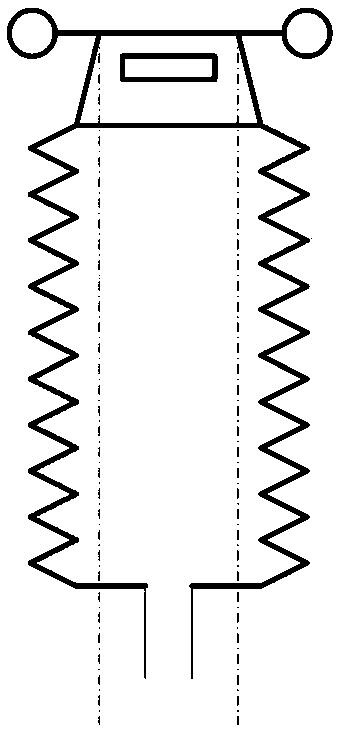
[0024] Such as figure 1 As shown, the flexible robot for narrow space detection in the preferred embodiment of the present invention includes a vehicle frame 10, a control unit 20, a motor unit (not shown in the figure), a pneumatic unit (not shown in the figure), a cable unit 30, a telescopic The casing unit 40, the steering guide wheel 50, the camera unit 60, and the distance sensor (not shown in the figure), wherein the control unit 20, the motor unit, the pneumatic unit, the cable unit 30, and the telescopic casing unit 40 are respectively connected and arranged on the vehicle frame 10, the control unit 20 is respectively connected to and controls the motor unit, the pneumatic unit, the camera unit 60, and the distance sensor.
[0025] In this embodiment, the cable unit 30 includes two cables, and the first ends of the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More