

Binocular vision target surface 3D detection method and system based on unmanned aerial vehicle
A binocular vision system and binocular vision technology, applied in the field of binocular vision target surface 3D detection, can solve the problems of increasing system cost, heavy weight, and high requirements on the load of unmanned aerial vehicles, and achieves flexible and convenient operation, simple use, and low cost. cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] In order to make the objects and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
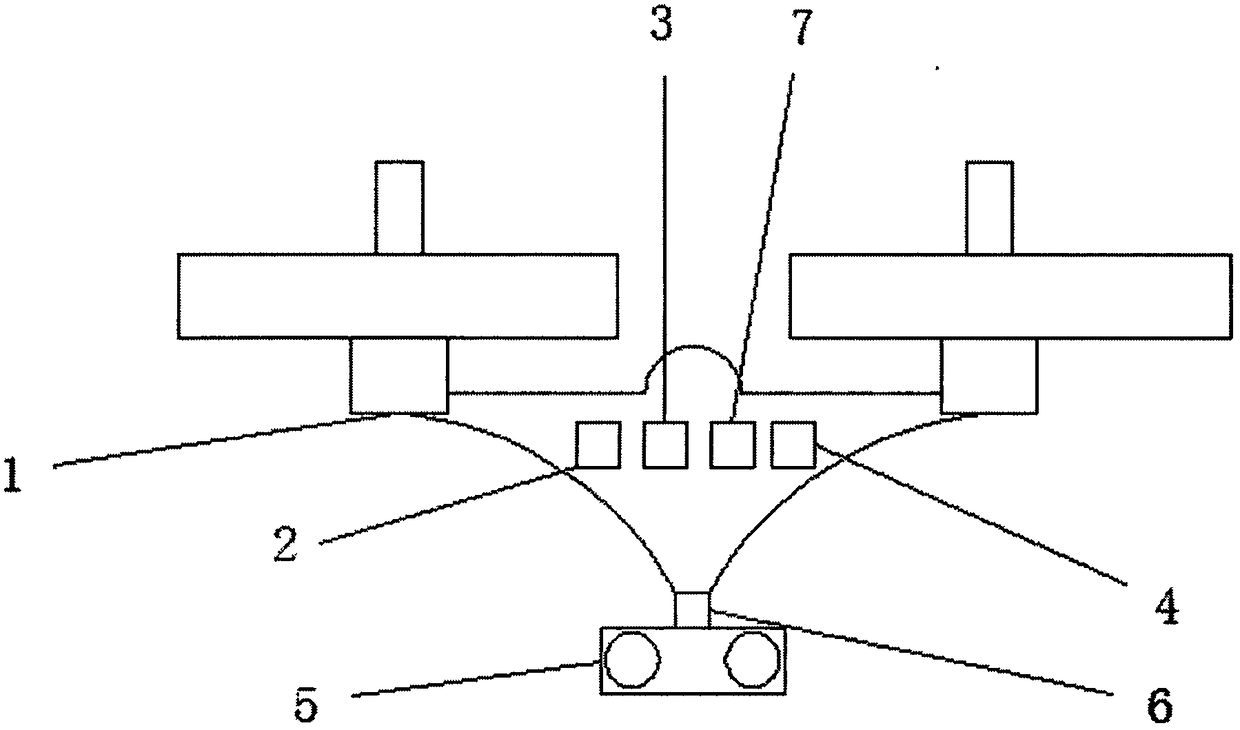
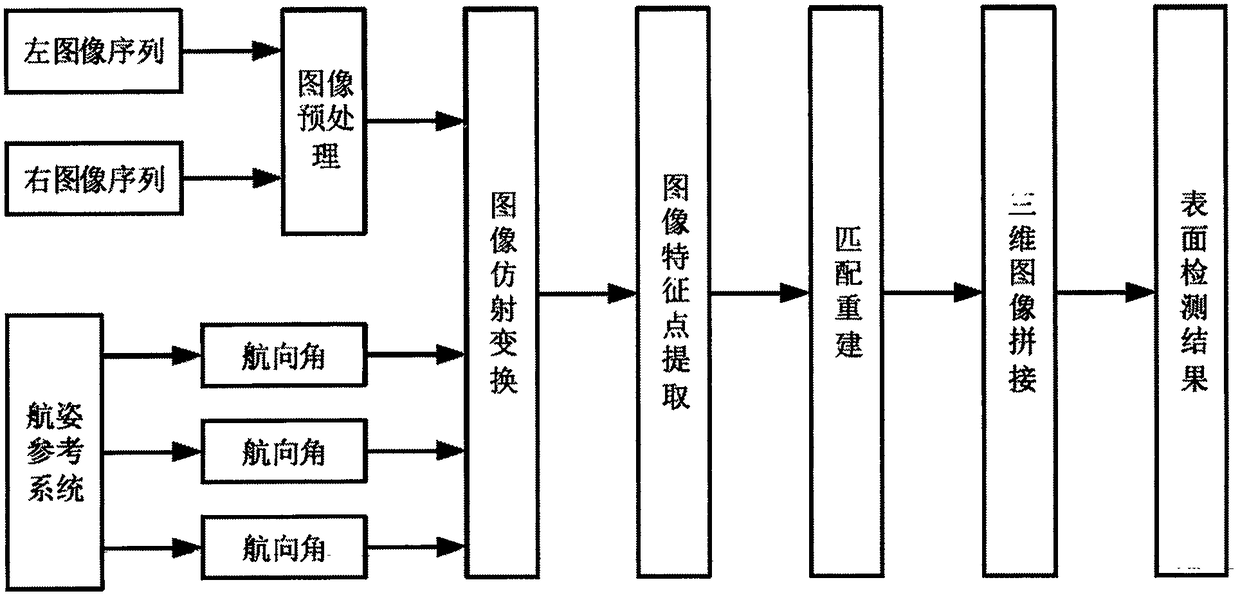
[0069] Such as figure 1 As shown, the embodiment of the present invention provides a 3D detection system for binocular vision target surfaces based on drones. The 3D surface detection method is based on binocular stereo vision 3D reconstruction and estimates the pose of the drone. The pose correction is combined with the 3D reconstruction through the software algorithm to obtain the depth information of the target, and then obtain the surface detection result. The system consists of drone, battery pack, on-board control unit, WiFi or wireless telex module, binocular camera with memory card, fixed attachment mechanism to attach the camera to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More