

Control system and method of ground walking robot for routing inspection of power machine room
A walking robot and walking control technology, applied in the direction of control/regulation system, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of personal injury, difficulty in ensuring the accuracy of inspection, and low work efficiency. Achieve the effect of improving discovery ability and ensuring safe, reliable and efficient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
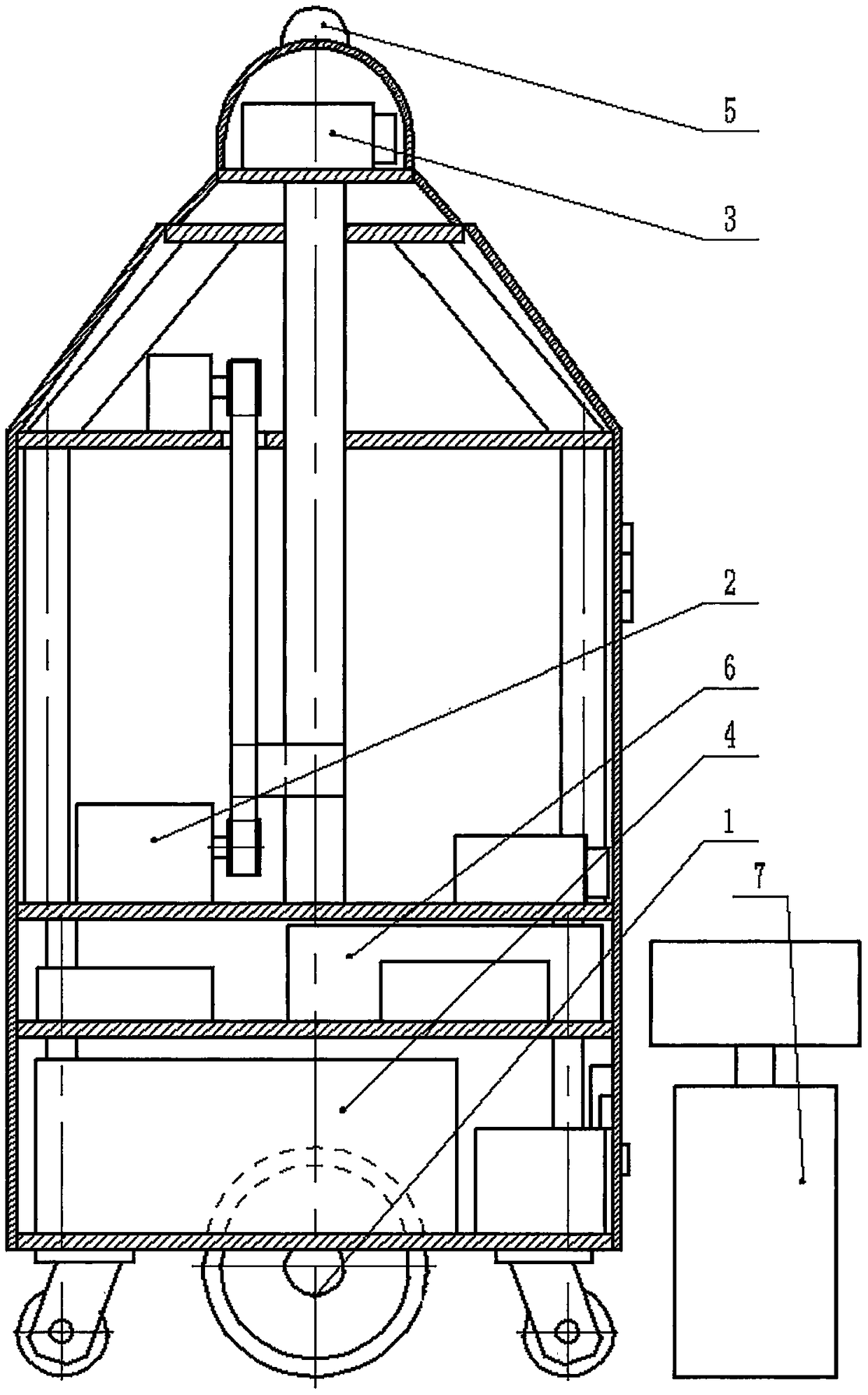
[0019] Such as figure 1 As shown, a control system and method for a ground walking robot used for inspection in an electric machine room, including a ground walking control system 1, a pan-tilt lifting control system 2, an inspection information collection system 3, a power supply system 4, and an alarm system 5 , the industrial control host 6 and the remote control platform 7, the ground walking control system 1 is made up of a walking motor drive controller, a power drive wheel device and a Kinect depth camera, and the walking motor drive controller receives the forward and backward signals sent by the industrial control host 6 , turn left, turn right and stop commands, the walking motor drive controller controls the power drive wheel device to perform forward, backward, left turn, right turn and stop actions, the Kinect depth camera senses and captures the surrounding environment information, senses and captures the device position information, sensing and ingesting the pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More