

Structure of observation-level underwater robot
A technology of underwater robots and propellers, which is applied to underwater operation equipment, transportation and packaging, ships, etc. It can solve problems such as unstable floating, no anti-flow function, and underwater robots are easily washed away by water flow, and achieve resistance The effect of small, stable position and smooth appearance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
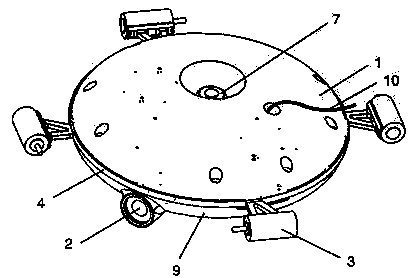
[0014] The whole upper shell 1 is made of buoyancy material, so that the center of buoyancy of the robot is on the upper side, and it is just in a floating state in the water. The vertical propeller 7 fixed at the center of the underwater robot can promote the robot to rise and sink. The underwater camera 2 embedded in the lower shell can take video. The four side thrusters 3 fixed around the robot are placed at 45 degrees to the center line of the camera 2, the speed of each side thruster 3 can be adjusted independently, and the four side thrusters 3 cooperate with each other to generate the combined force of the thrust and the received The water flow resistance cancels out, so that the underwater robot remains relatively stationary in the flowing water and the ground.
Embodiment 2
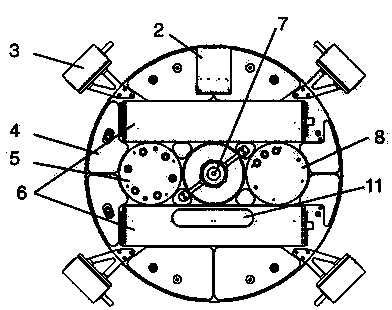
[0016] exist figure 2 Among them, the power cords of two horizontally placed battery compartments 6 lead to the main control compartment 5 from the left end, and the control lines of five propellers are drawn from the bottom of the main control compartment 5 and connected with the corresponding propellers. The bottom end of the communication compartment 8 leads out the connecting wire of the camera 2 and the communication line connected with the main control compartment 5, and the top end of the communication compartment 8 leads out the communication cable 10 connected with the upper computer.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More