Spherical robot visual positioning system
A spherical robot, visual positioning technology, applied in the direction of navigation calculation tools, etc., can solve the problems of time drift error, unusable, difficult to find the position of the odometer, achieve accurate positioning, solve the problem of constant installation, improve efficiency and accuracy degree of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the objects and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
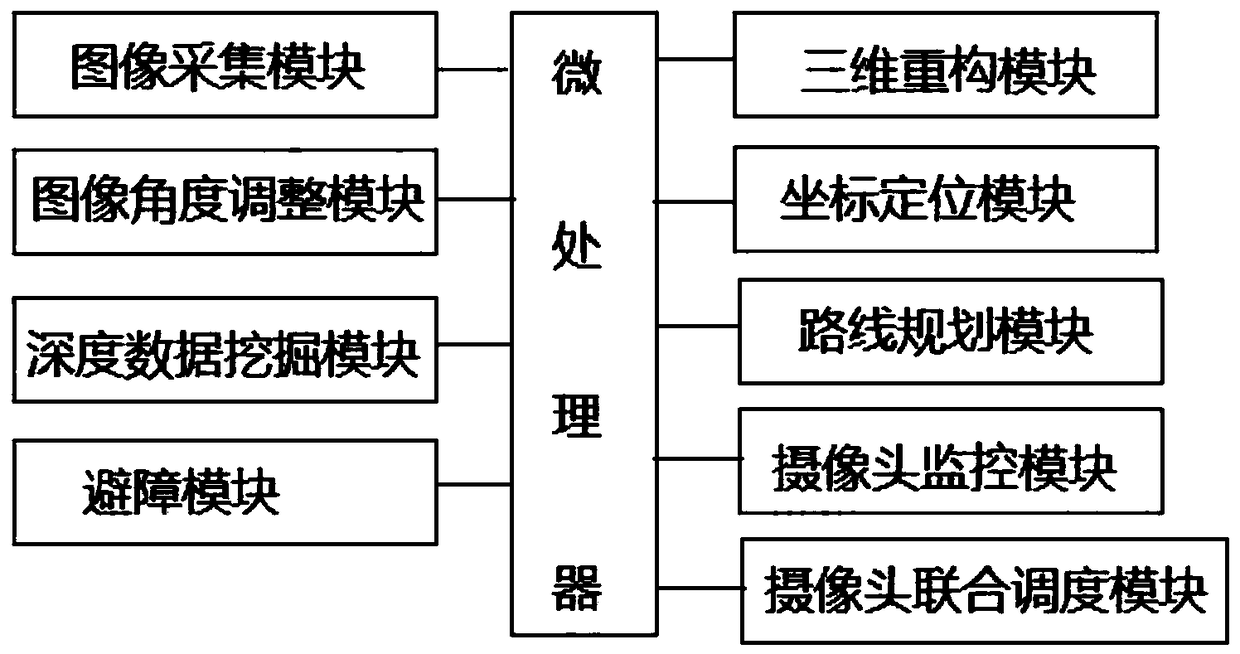
[0028] like figure 1 As shown, the embodiment of the present invention provides a spherical robot vision positioning system, including
[0029] The image acquisition module collects image data through N fisheye lenses with gyroscopes evenly installed on the spherical robot; and sends the collected image data to the image angle adjustment module;
[0030] The image angle adjustment module is used to determine the deflection angle of each image according to the data collected by the gyroscope, reconstruct the other images according to the deflection angle of one of the images, and send the processed image to the deep data mining module ; Complet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com