

Autonomous obstacle avoidance method for AGV
An obstacle avoidance and algorithm technology, applied in the field of AGV, can solve problems such as collisions, reduce the possibility of accidents and improve work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0017] In the embodiment of the present invention, one laser sensor is set, combined with the method of short-term memory, the obstacle distribution of the scene around the AGV is collected in real time through the laser sensor, and the obstacle avoidance algorithm is designed according to the collected obstacle distribution, and the obstacle avoidance strategy is formulated to control AGV independently finds feasible channels, bypasses obstacles, reaches the target location, and realizes autonomous obstacle avoidance.
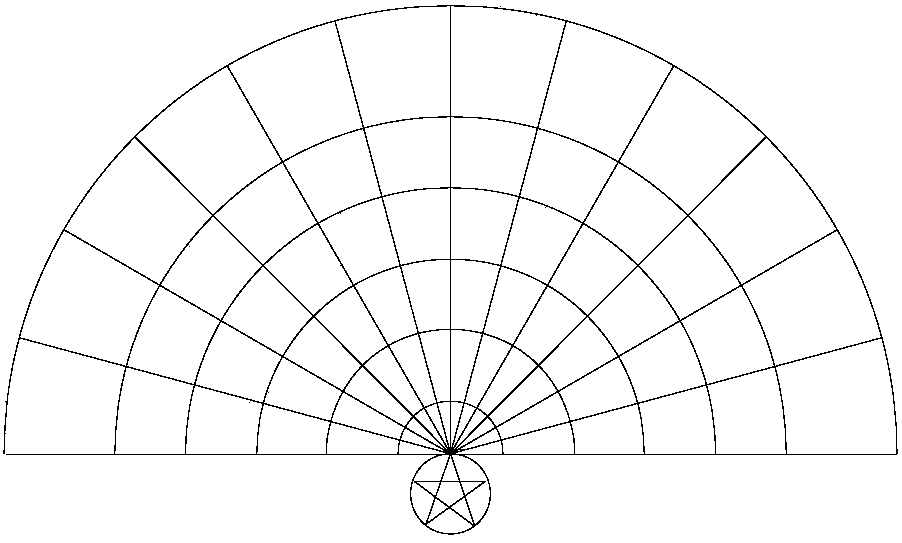
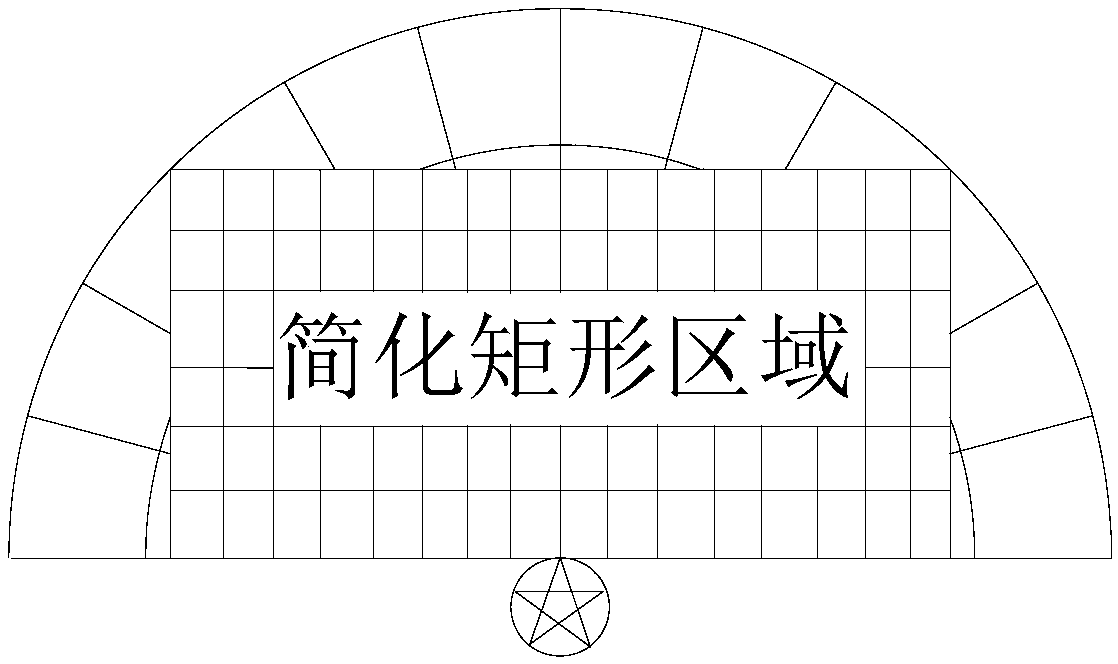
[0018] The laser sensor can emit laser beams to obtain the distribution information of surrounding obstacles. Take the fan-shaped area 180° in front of the laser sensor with a radius of 5m as the detection range, such as figure 1 shown. Since the fan-shaped area has a large amount of calculation when d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More