

A Bionic System for Four-Limbed Animals Based on Pneumatic Muscles
A pneumatic muscle and bionic system technology, applied in the field of bionic robots, can solve problems such as the inability to truly describe the distribution of muscles of limbs, and achieve the effects of compact structure, high power/mass ratio, and good flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032]The present invention will be described in detail below according to the accompanying drawings and preferred embodiments, and the purpose and effect of the present invention will become clearer. The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
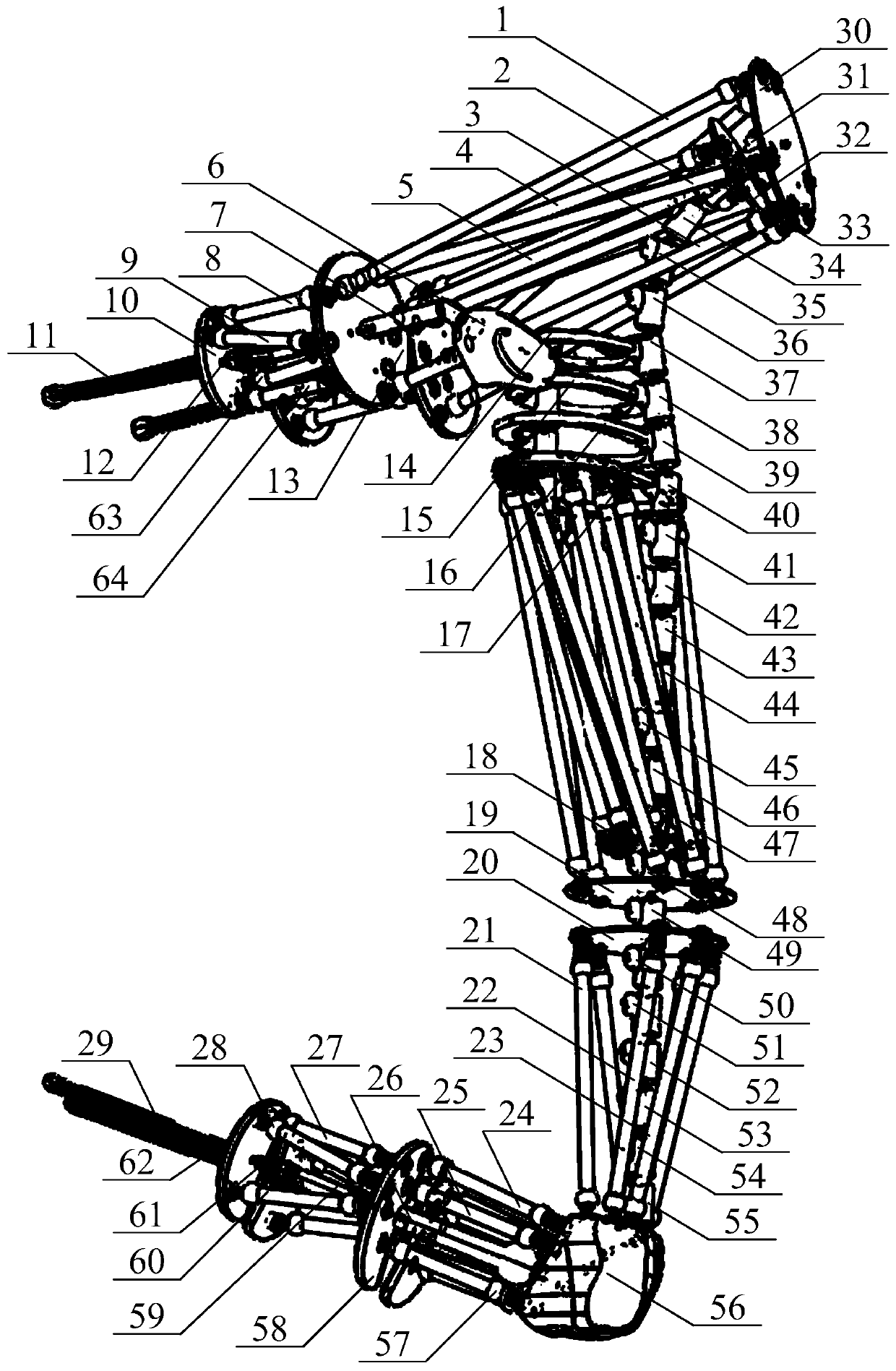
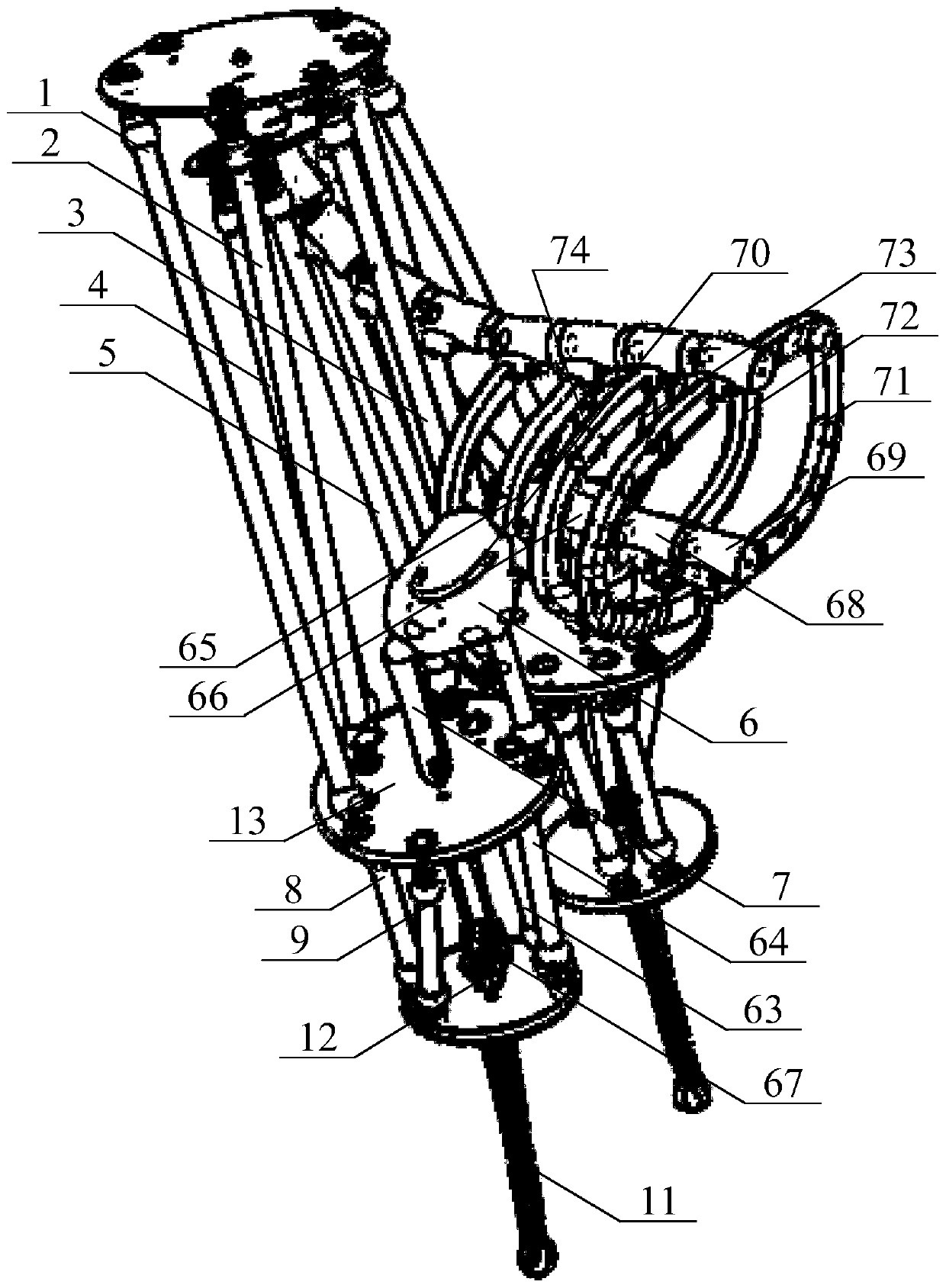
[0033] Such as figure 1 , 2 , 3, and 4, a bionic system based on pneumatic muscles for limbs includes: pectoralis-1, brachialis-2, splenius-3, superficial pectoralis muscle-4, brachialis-5, Scapula-6, upper humerus-7, wrist radial extensor-8, wrist oblique extensor-9, radius aerodynamic muscle connecting plate-10, radius lower half-11, upper radius-12, humerus aerodynamic Muscle connecting plate one 13, left rib one 14, left rib two 15, left rib three 16, left rib four 17, chest pneumatic muscle conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More