Aerial patrol inspection robot flight control method and system
A technology for inspection robots and flight control systems, applied in the direction of control/regulation systems, instruments, attitude control, etc., can solve the problems of few practical applications, single function, difficult operation, etc., and achieve difficult operation, fast search, and vision broad effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
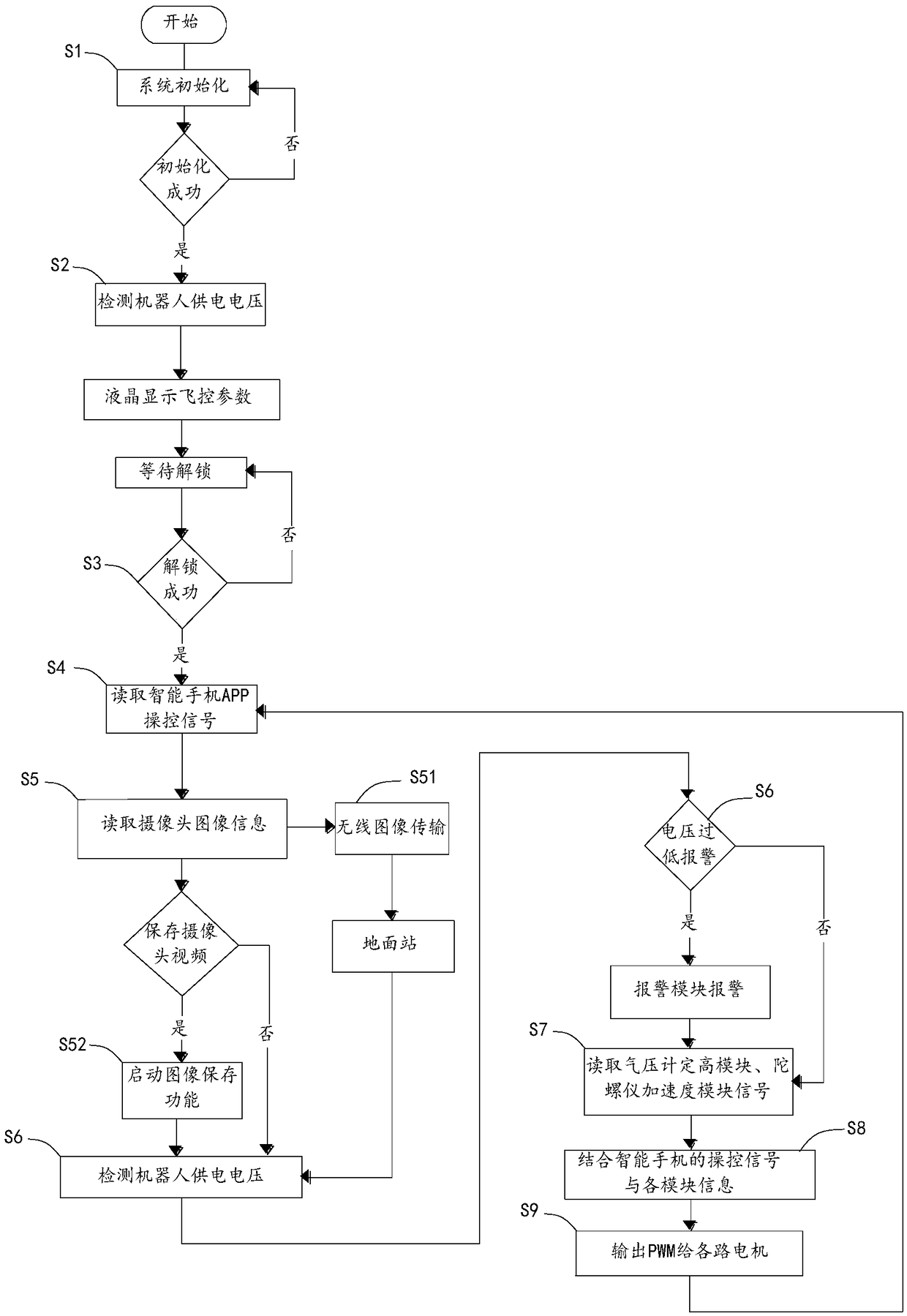
[0039] A kind of flight control method of aerial inspection robot, such as figure 1 shown, including the following steps:
[0040] Step S1, system initialization, including gyroscope acceleration module initialization, barometer altitude determination module initialization, camera module initialization and motor drive module initialization;
[0041] Step S2, detecting the battery voltage of the robot, calculating its voltage value through AD processing and CPU, an...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap