

Disturbance rejection mechanical arm repeating motion planning method with saturation characteristic
A technique for repetitive motion and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as no speed saturation design, limited speed of manipulator joints, and inability to meet the operating accuracy of anti-disturbance manipulators. , to achieve safe and effective operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings.
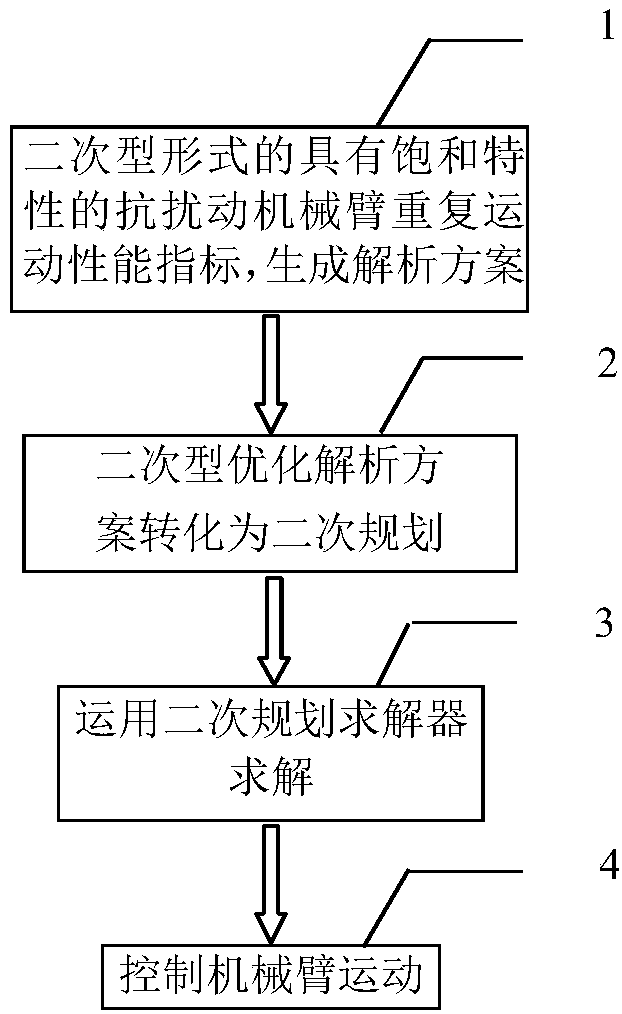
[0021] figure 1 The shown repetitive motion planning method of the anti-disturbance manipulator first proposes the repetitive motion performance index and constraints of velocity layer saturation; then transforms it into the corresponding quadratic programming; then applies the quadratic programming solver to solve; finally, the lower computer controller according to The result obtained by the solver is used to control the robotic arm, and finally achieve repetitive motion.
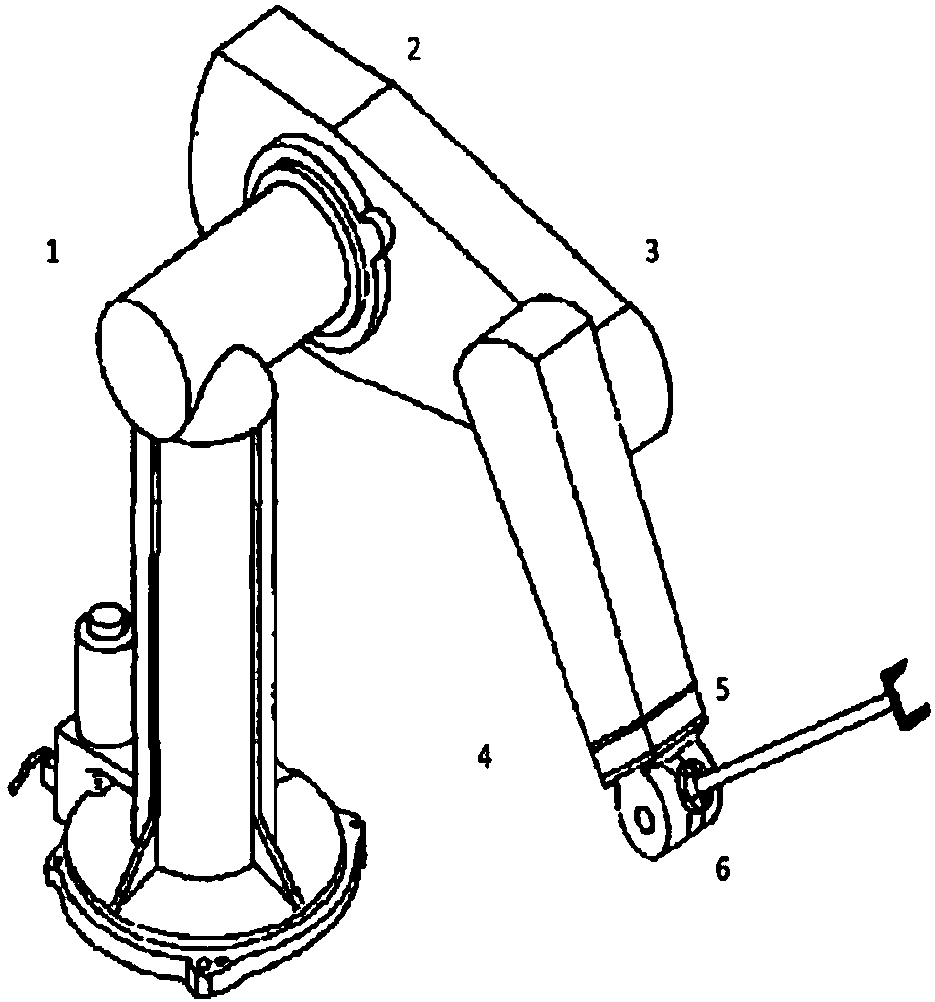
[0022] figure 2 Shown is to realize the mechanical arm of the present invention, it is a PUMA560 mechanical arm with six degrees of freedom. The mechanical arm is composed of six connecting rods, specifically joint 1, joint 2, joint 3, joint 4, joint 5 and joint 6.
[0023] The speed layer repetitive motion planning scheme designed by the present invention is
[0024] minimize
[0025] Res...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More