

Patrol robot and underground pipe gallery information management system with same
An inspection robot and pipe gallery technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of difficult deployment and post-maintenance, large system occupation space, high cost, etc., to avoid information screening and conversion. Work, high accuracy, simple structure effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
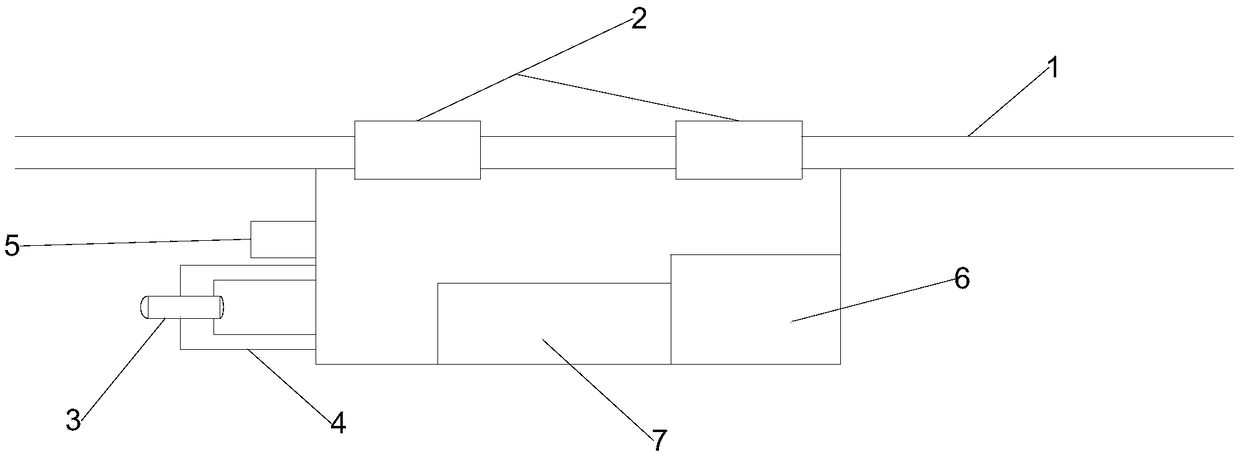
[0038] The invention provides a patrol robot, such as figure 1 As shown, the inspection robot includes a driving device 2, an acquisition device 3, a tracking device 5, an adjustment device 4 and a controller 6, and the driving device 2 includes a driving wheel suspended on the running rail 1 and is used to drive the The driving motor of the driving wheel; the acquisition device 3 is used to obtain the data information of the instruments and meters in the pipe gallery; the tracking device 5 is used to obtain the position information of the instruments and meters in the pipe gallery; the adjustment device 4 and the Acquisition connection for adjusting the position of the acquisition device 3; the controller 6 is respectively in communication with the drive device 2, the acquisition device 3, the tracking device 5 and the adjustment device 4, according to the The position information of the instrumentation obtained by the tracking device 5 is fed back to the controller 6, the co...
Embodiment 2
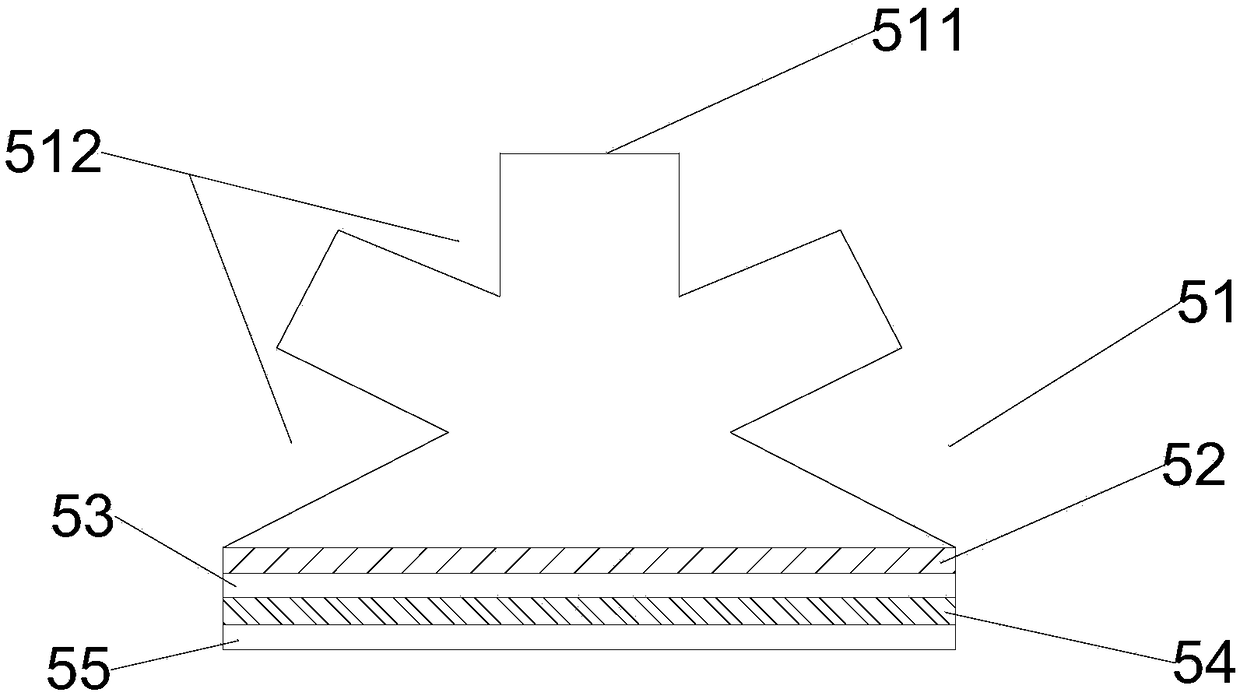
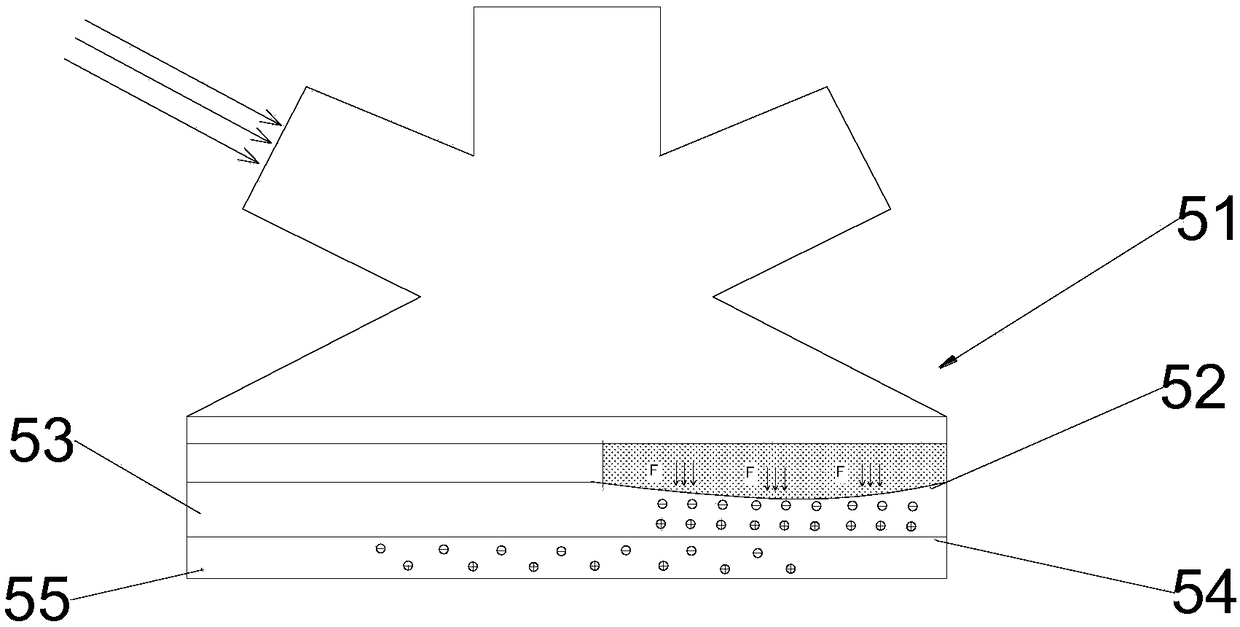
[0047] The difference between this embodiment and Embodiment 1 is that, as image 3 , 4 As shown, there are three light-guiding surfaces 511 on the refraction layer 51 in this embodiment, including a first light-guiding surface, a second light-guiding surface, and a third light-guiding surface, and the first light-guiding surface The light surface is located in the middle of the refraction layer 51, and the second light introduction surface and the third light introduction surface are respectively symmetrically distributed on both sides of the first light introduction surface. In this embodiment, the refraction layer 51 If it is set as an upwardly convex semicircular shape, the three light-guiding surfaces 511 are distributed in a semicircular shape on the refraction layer 51. The setting of the semicircular shape is conducive to fully collecting the light emitted by the specific light source on the instrument. light.
[0048] Such as image 3 As shown, the inspection robot...
Embodiment 3
[0053] Such as Figure 5 As shown, the difference between this embodiment and Embodiment 2 is that the refraction layer 51 in this embodiment is set in a semicircular shape concave downward, and the three light-guiding layers arranged on the refraction layer 51 The surface 511 forms a downwardly concave shape, so that the installation of the light-guiding surface 511 is firstly simpler and firmer, and since the refraction layer 51 is concave downward, it is easier to place the light-guiding surface 511 on its concave surface , and the light guiding surface 511 is more stable when placed on the concave surface, and secondly, the light guiding surface 511 is enclosed in the refractive layer 51, and the concave setting of the refractive layer 51 guides the light The surface 511 has a protective effect to a certain extent, and again can save material.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More