

A multi-joint motion mechanism of an amphibious frogboard robot
A motion mechanism and robot technology, applied in the field of robotics, can solve the problems that the efficiency of amphibious robots is difficult to meet the actual needs, the fusion degree and stability of the mechanical structure of the robot are unfavorable, and it is difficult to ensure the movement ability of the robot at the same time. Design, improve control accuracy and reliability, and improve the effect of propulsion efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in detail below with reference to the accompanying drawings and examples.
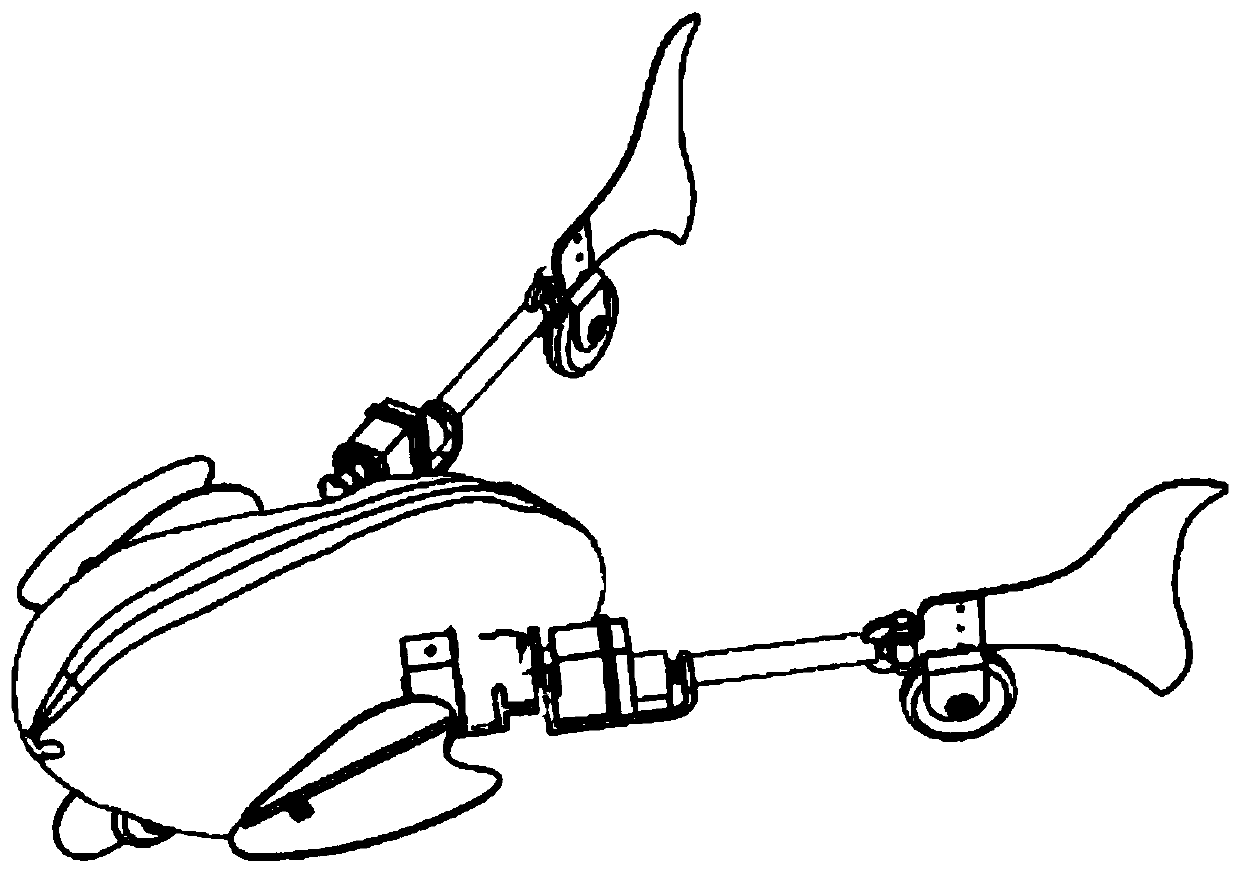
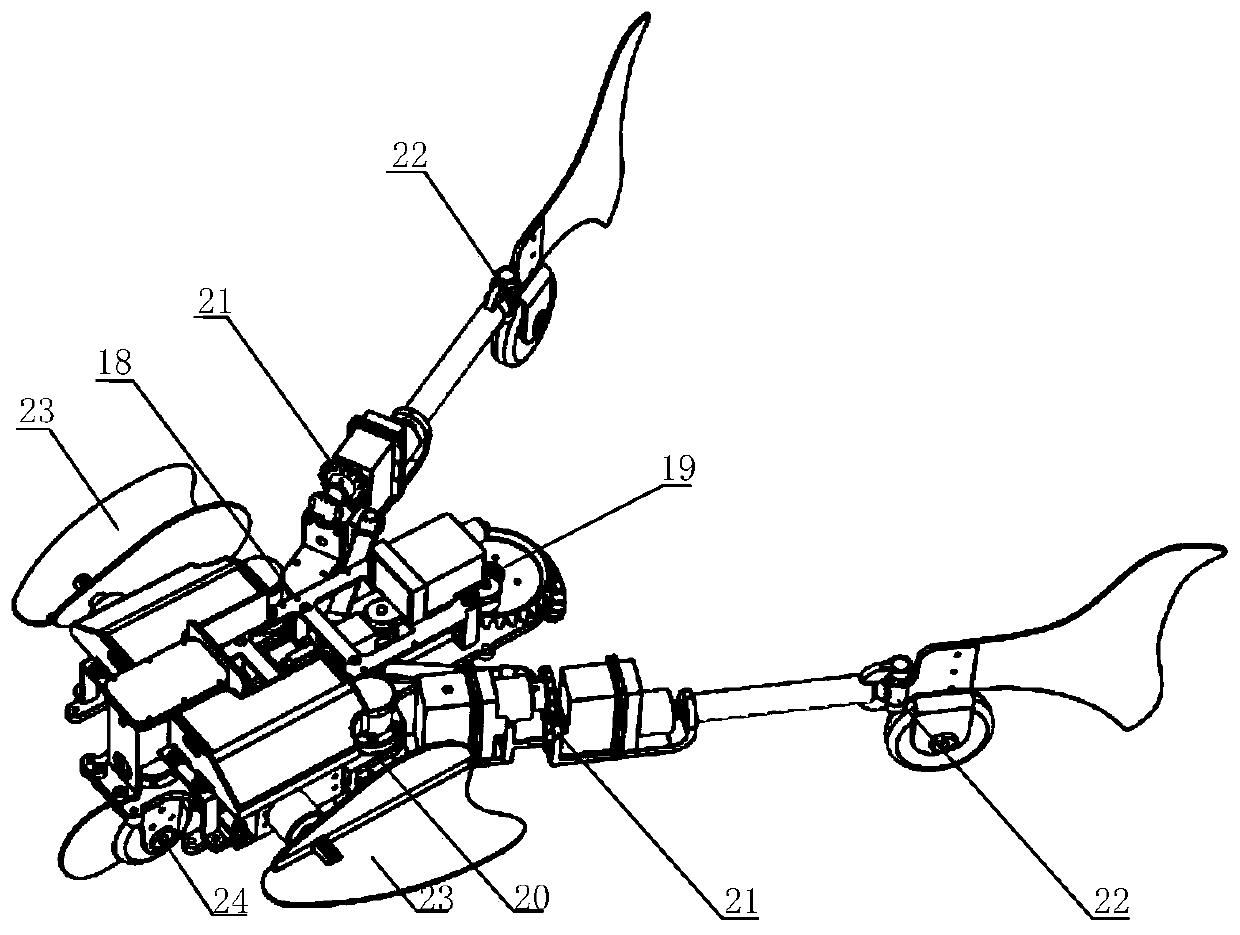
[0039] The invention provides a multi-joint motion mechanism of an amphibious frogboard robot, such as figure 1 , figure 2 As shown, the multi-joint motion mechanism is composed of a fixed base plate 18, a crank slider mechanism 19, a first joint 20 of the leg arm, a second joint 21 of the leg arm, and a third joint 22 of the leg arm. The peripheral devices include a pectoral fin 23, a front fin and Front-wheel 24, waterproof mechanism.
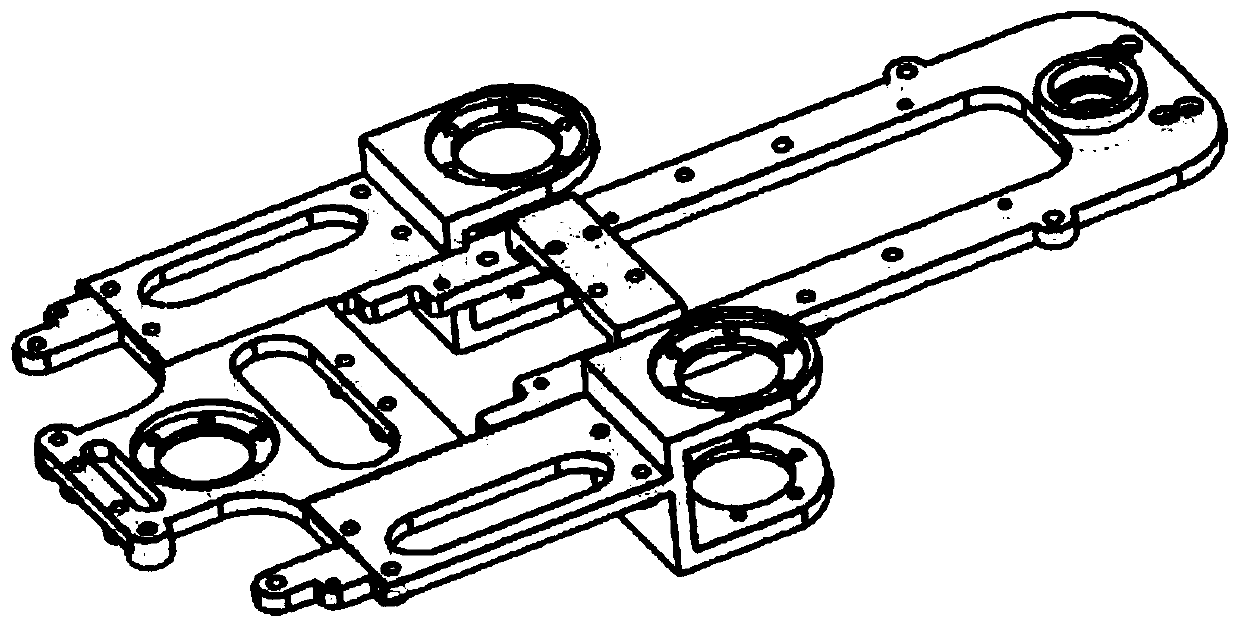
[0040] Such as image 3 As shown, the fixed base plate 18 is the skeleton of the robot, and the motion mechanisms and peripheral devices of the first joint 20 , the second joint 21 , and the third joint 22 are all fixed on the fixed base plate 18 .
[0041] Such as figure 2 As shown, the DC motor is fixed on the lower part of the fixed base plate 18, and the crank disk 3 is fixed on the fixed base plate 18 through b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More