

Multi-robot communication networking method based on improved ant colony AODV protocol
A multi-robot and robot technology, applied in the field of wireless communication, can solve the problems of wasting node resources and slow convergence speed, and achieve the effects of reducing routing overhead, increasing throughput, and strong applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
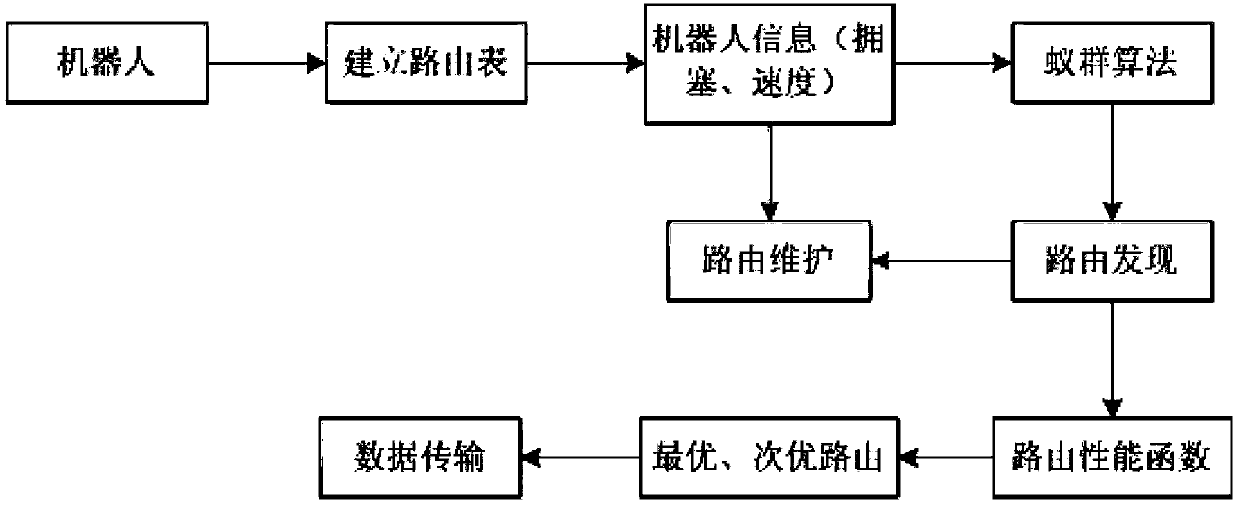
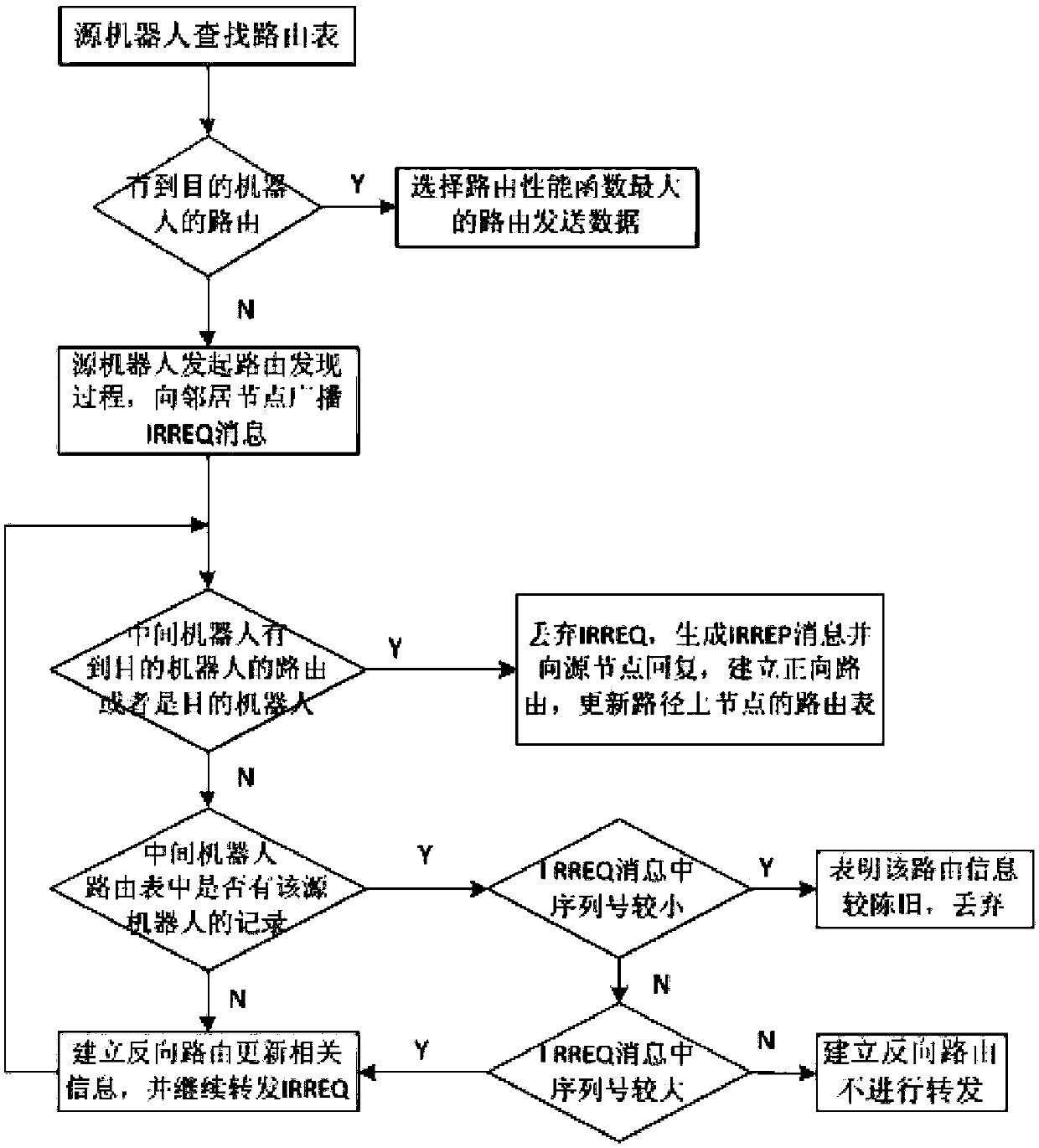
[0043] see figure 1 , this embodiment provides a multi-robot communication networking method based on the improved ant colony AODV protocol, the route discovery stage is as follows figure 2shown, including the following steps:
[0044] S1. The source robot node queries whether there is a route to the destination robot in the robot routing table. If it exists, select the route with the largest routing performance function value for data transmission. Otherwise, the source robot initiates route discovery and sends an improved route to the adjacent robot node. request message;
[0045] S2. Judging whether the robot node receiving the improved routing request message is the destination robot node or has the routing of the destination robot, if so, sends an improved routing response message to the robot node, establishes a forward route, and updates the robot node route on the path table; otherwise, detect intermediate robot nodes;
[0046] S3. Determine whether the intermediat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More