

Industrial conveying robot
A handling robot, industrial technology, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problem that industrial robots cannot adapt to various object clamping, and achieve the effect of increasing stability and increasing clamping force.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
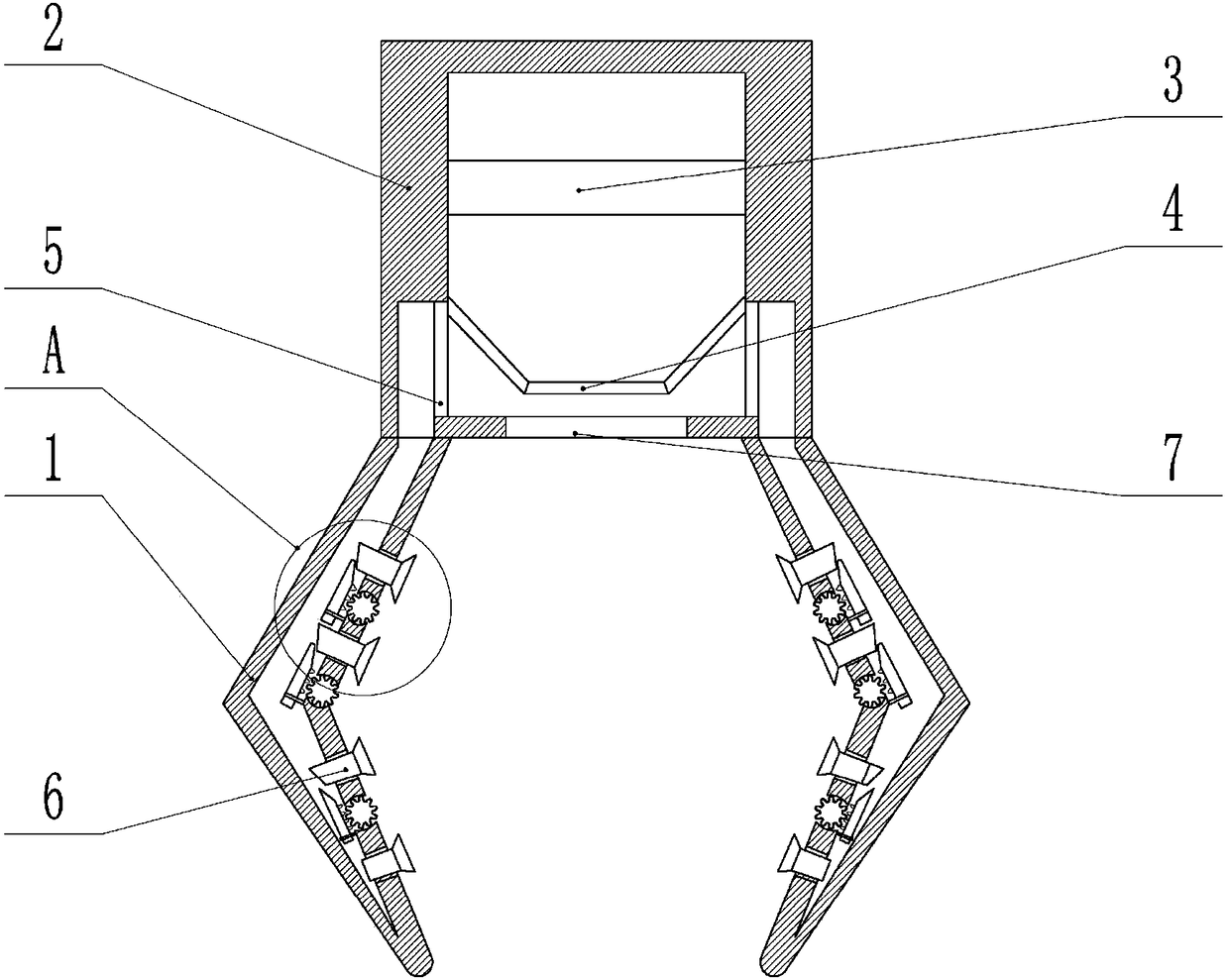
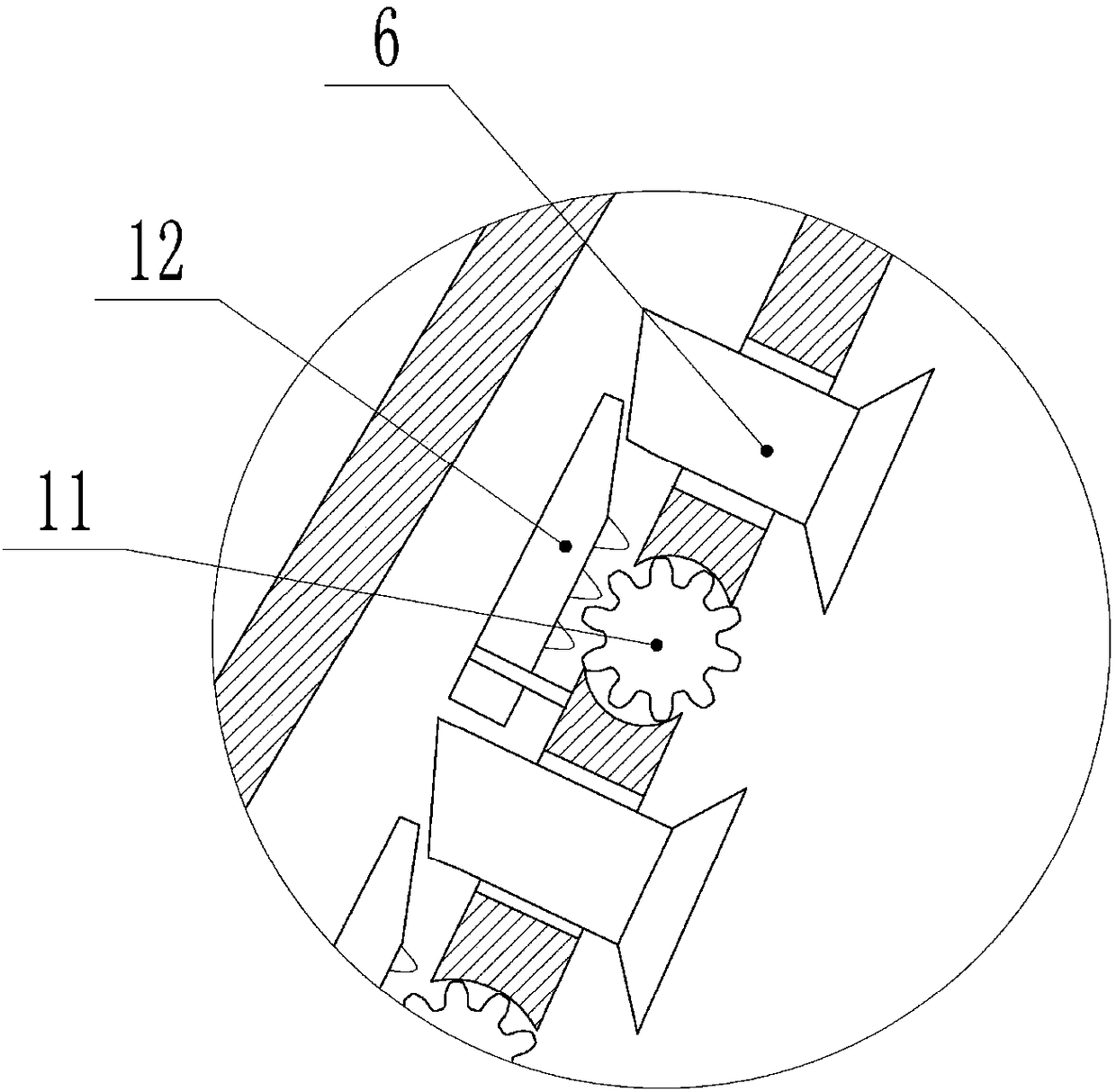
[0025] The embodiment is basically as attached figure 1 And attached figure 2Shown: the industrial handling robot, including the cylinder 2, the top of the cylinder 2 is provided with an inflator for inflating the cylinder 2, and the inflator can be an air pump; A microcontroller is electrically connected, and the microcontroller is electrically connected to the inflatable device. An air passage is provided on the left and right side walls of the lower end of the cylinder 2, and an opening 5 for communicating between the air passage and the chamber of the cylinder 2 is provided. 5 places are provided with a second solenoid valve; two clamping blocks 1 are detachably connected to the bottom of the cylinder 2 for clamping and transporting the workpiece. Extrusion channel, the side wall of the clamping block 1 close to the workpiece is provided with four slides, and the fastening block 6 is slidably connected in the slides, the clamping channel of the clamping block 1 and the v...
Embodiment 2
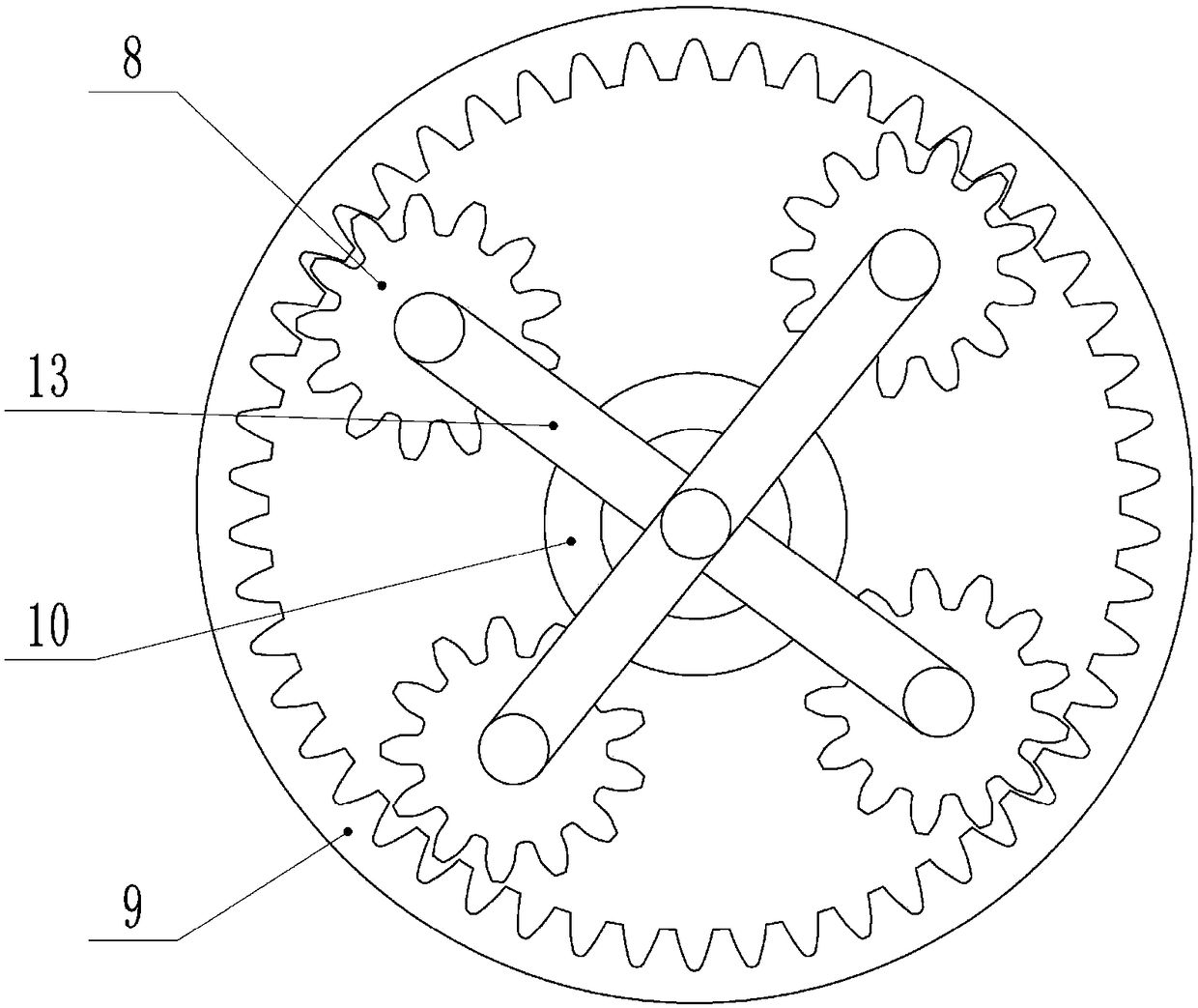
[0032] as attached image 3 As shown, the difference between the second embodiment and the first embodiment is that the industrial handling robot also includes a frame, and the frame is provided with an adjustment disc, and the adjustment disc includes an inner gear ring sleeve 9 which is rotatably connected to the frame, and the inner gear ring sleeve 9 There are four planetary pinions 8 evenly meshed inside, and the clamping block 1 is respectively arranged on the lower surface of the four planetary pinions 8 and hinged with the planetary pinions 8, and the two spaced apart planetary pinions 8 are rotatably connected with each other. Connecting rod 13, the intersection of two connecting rods 13 is provided with the rotating shaft that is rotatably connected with the frame, and the rotating shaft is provided with an annular elastic air bag 10 with the rotating shaft as the center of a circle, and the annular air bag 10 intersects with the connecting rod 13 and is connected by ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More